ART 机器人
机构:北京钢铁侠科技有限公司
类型:足式 » 双足人形
应用:科研实验作品
本公司法人或CEO可进行认证领取
所属机构

产品介绍
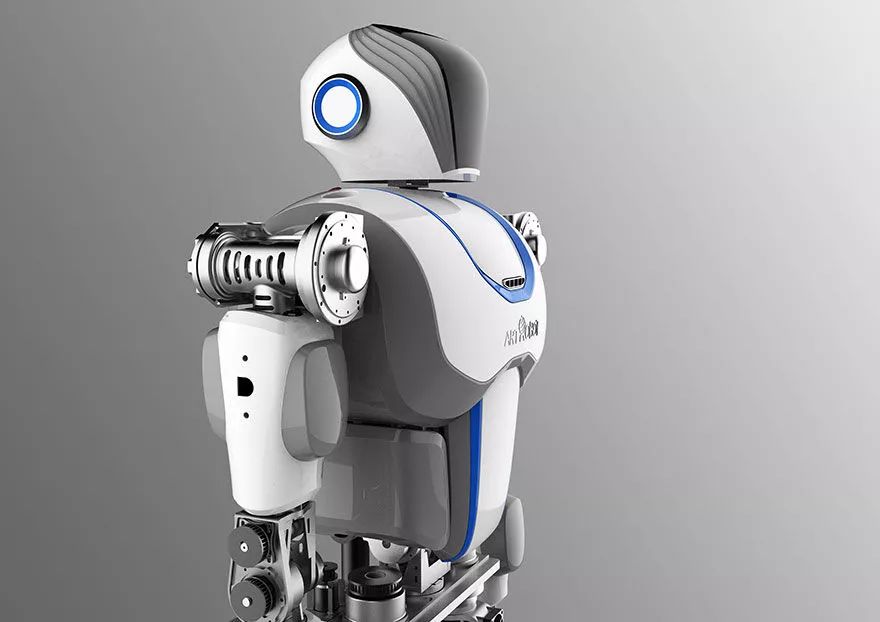
ART 机器人是钢铁侠机器人推出的一款双足大仿人机器人。
硬件上,钢铁侠科技并没有采用 Atlas 的液压驱动方案,而是自研了全套的电机驱动方案。之所以选择电机驱动方案,主要是因为Atlas为代表的液压驱动方案,噪音大、功耗高,并不太适用于工业机械以外的领域。
此外,Atlas的结构部分要依赖于高精度的金属3D打印机打印,很难标准化,这就意味着很难量产。为此,团队研发了高精度、无噪音的电机驱动,采用智能算法,可以智能适配多种型号的电机。
要让机器人像人一样行走,这个过程可以拆分成环境感知、步态规划、步行控制等几个环节。这其中,控制算法就是核心。钢铁侠科技采用了自研的姿态传感器、位置传感器,配合视觉、力觉等模块,可以满足机器人组合导航和步态、平衡控制的需求。

