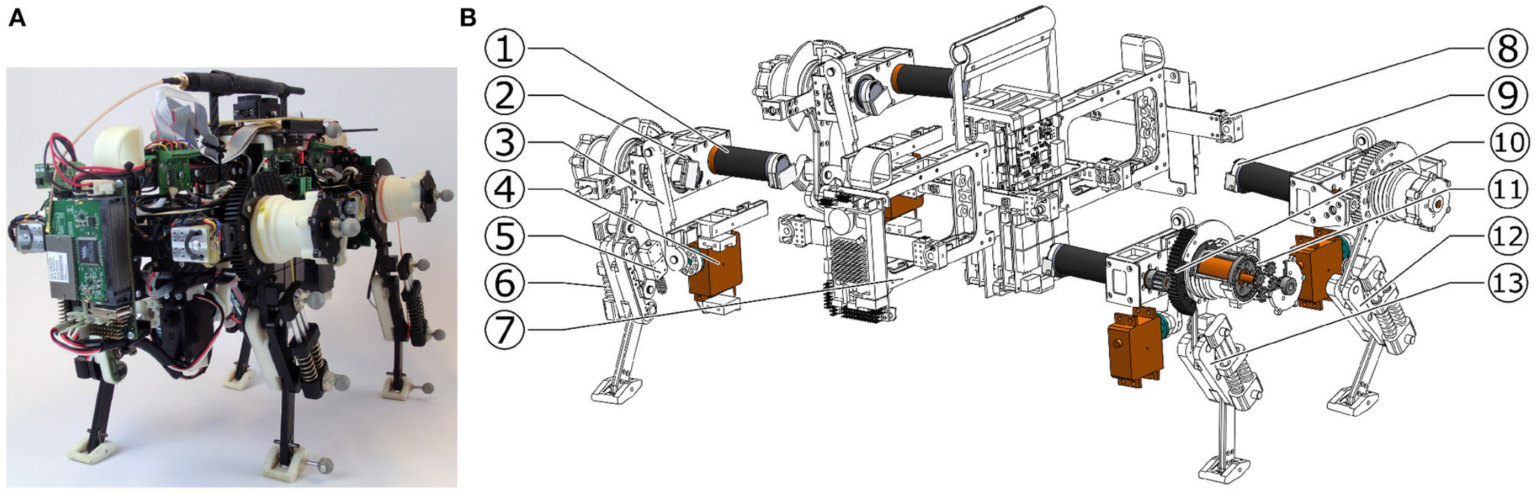
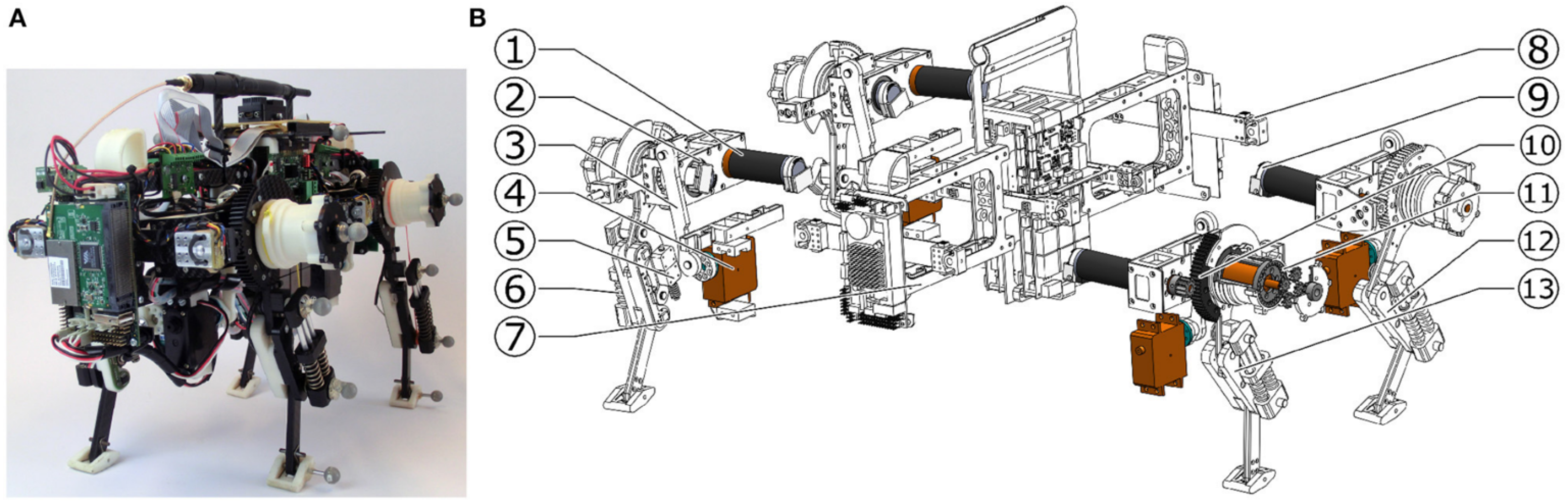
机器人介绍: Oncilla是由AMARSi联盟开发的新型移动,开源,具有兼容受电弓腿的多功能开源四足研究机器人。在崎岖的地形中,动物腿的运动由传感器反馈系统清晰地塑造。 开源者介绍: AMARSi是第七框架计划中欧盟资助的研究项目。该项目是一个大型一体化项目(见欧盟项目类型),托管在信息和通信技术(ICT)类别(见欧盟项目主题),E5单元:认知系统,交互和机器人(见所有单元)。