首页导航
产品动态
生态版图
申请收录
交流社区
首页
/
开发者详情
J_H_Li
官网:
https://space.bilibili.com/1134403370
团队:
开发者
我要认领
本公司法人或CEO可进行认证领取
企业介绍
旗下产品
相关视频
开发者介绍
擅长自制HECTOR双足机器人的开发者,已有开源分享的机器人控制教程:最优控制,足式机器人控制。
旗下产品
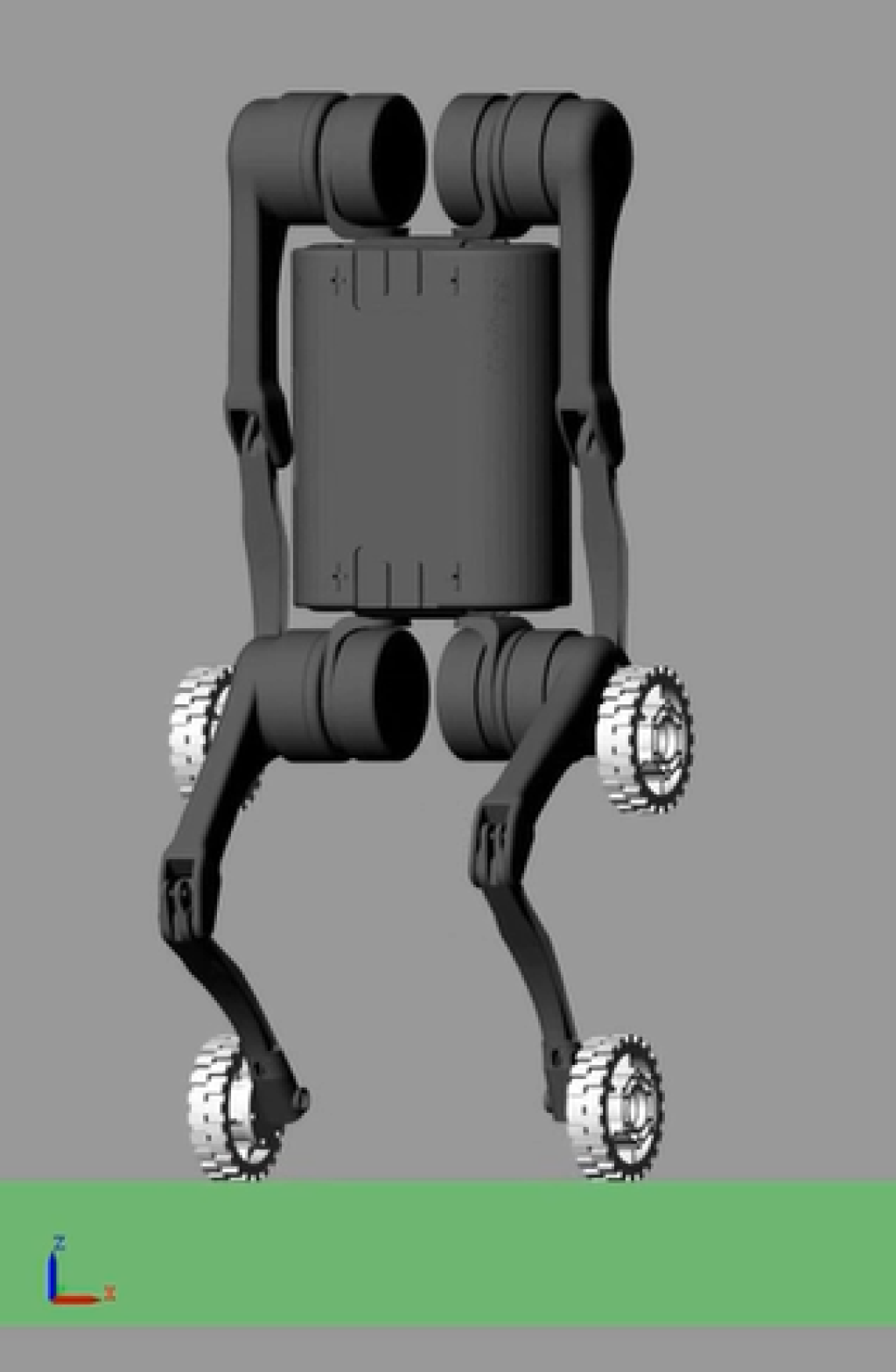
Hector
Hector
机构:J_H_Li
类型:足式 » 双足非人形
应用:科研实验作品
Hector是个人开发者J_H_Li,在宇树go1机器人基础上改进得到的双足机器人。 电机为宇树a1电机,运控算法使用MPC控制,粗糙地面行走速度最快1.6m/s。
相关视频