
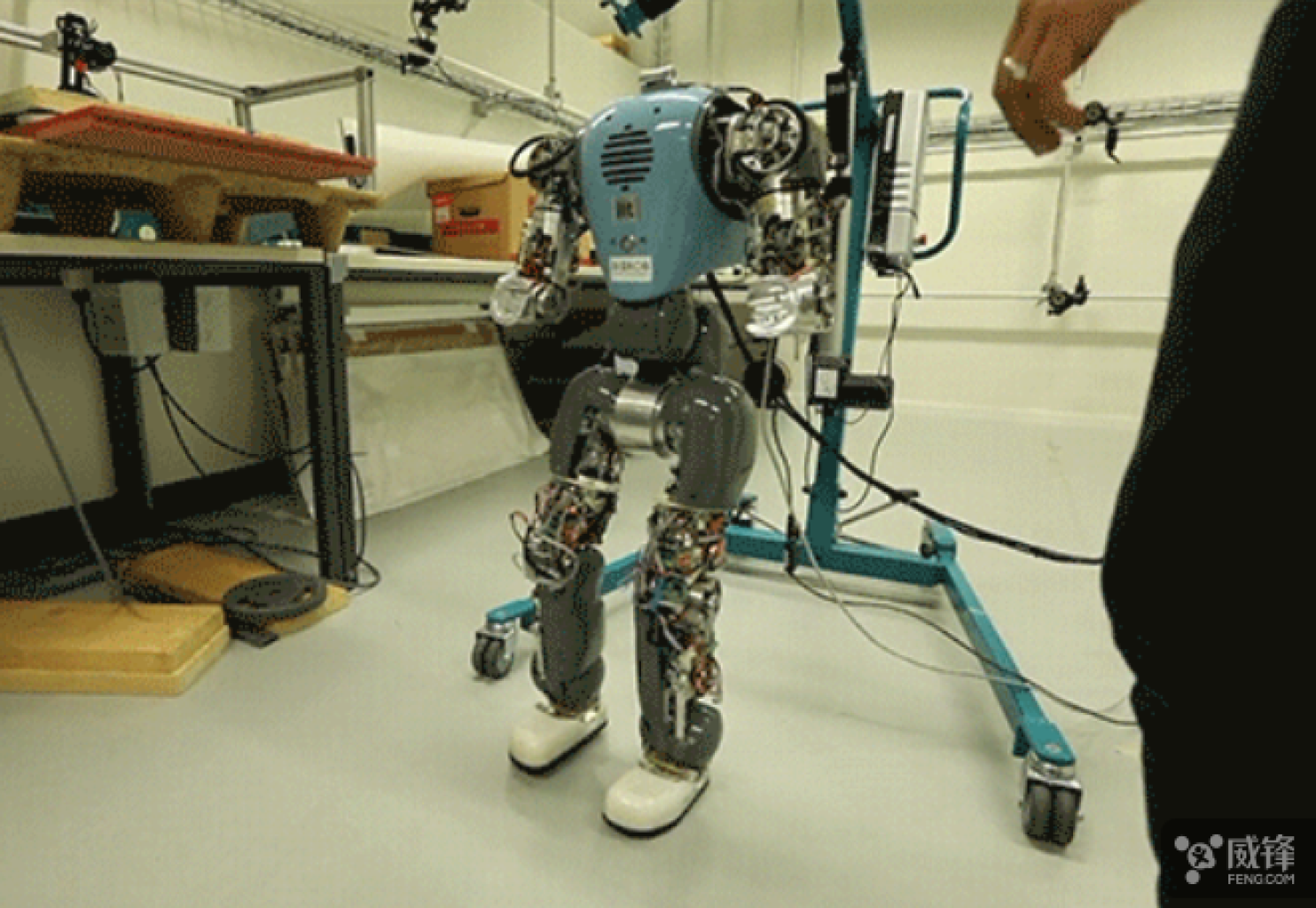
Coman
机构:意大利理工学院 Istituto Italiano di Tecnologia(IIT)
类型:足式 » 双足人形
应用:仿人机器人
本公司法人或CEO可进行认证领取
所属机构

产品介绍




相关文章
2019-03-03
知乎
2017-09-26
凤凰网
2013-04-17
广州菱控
相关视频
2019-03-03
知乎
2017-09-26
凤凰网
2013-04-17
广州菱控