
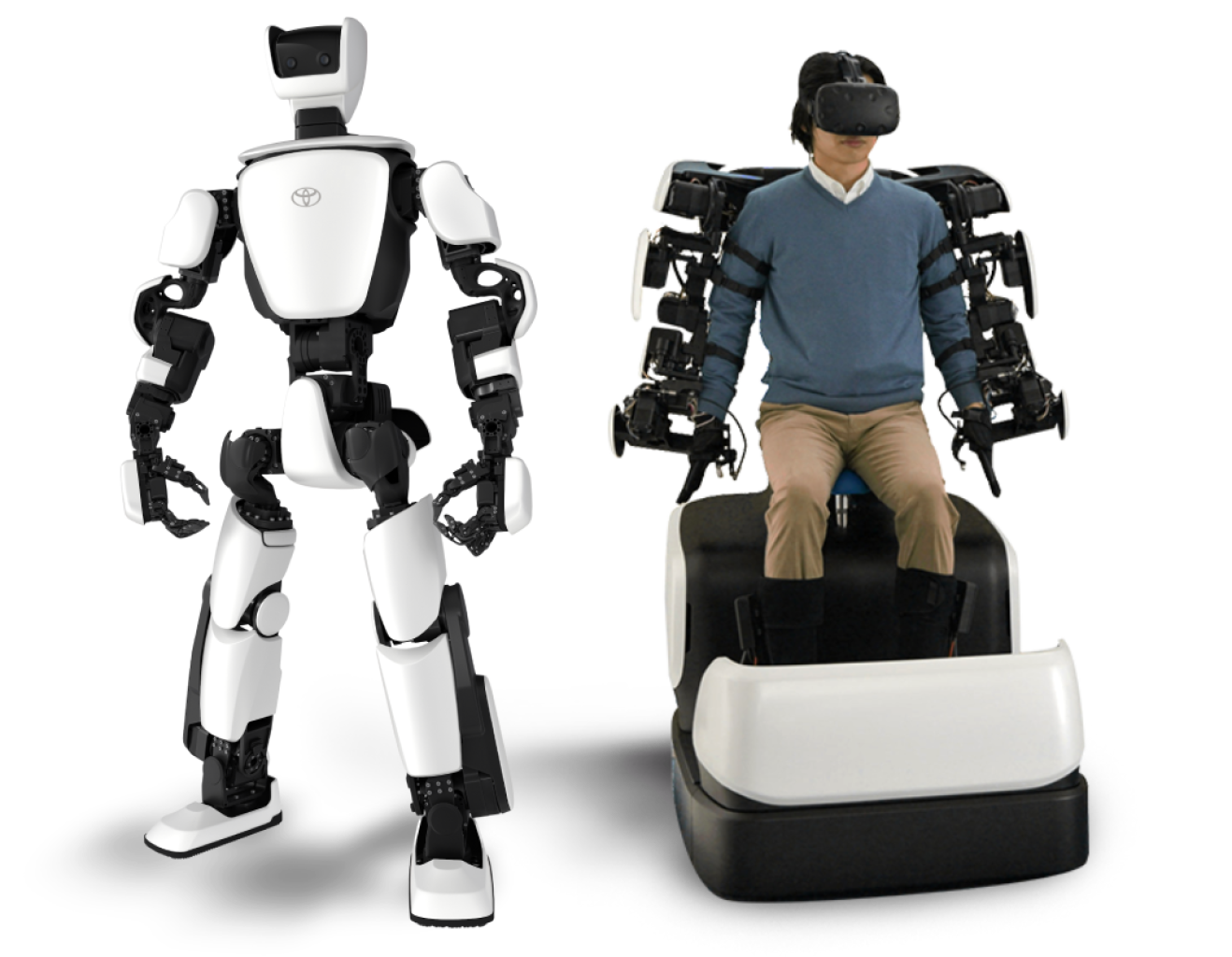
T-HR3
机构:丰田 Toyota Motor
类型:足式 » 双足人形
应用:个人服务机器人, 玩具机器人
本公司法人或CEO可进行认证领取
所属机构

产品介绍






相关文章
2023-12-30
知乎
2021-12-20
搜狐
2020-06-19
21ic
2019-11-05
知乎 | 科技达人
2018-12-23
电子发烧友
2018-12-14
百家号 | 机器人大讲堂
2018-01-18
搜狐 | 装备参考
2018-01-11
知乎 | 堂博士
2017-11-25
搜狐 | TechPunk
2017-11-24
搜狐
2017-11-22
CSDN | TomRobot_
相关视频
2023-12-30
知乎
2021-12-20
搜狐
2020-06-19
21ic
2019-11-05
知乎 | 科技达人
2018-12-23
电子发烧友
2018-12-14
百家号 | 机器人大讲堂
2018-01-18
搜狐 | 装备参考
2018-01-11
知乎 | 堂博士
2017-11-25
搜狐 | TechPunk
2017-11-24
搜狐
2017-11-22
CSDN | TomRobot_