Artemis
机构:RoMeLa(加州大学洛杉矶分校机器人与机构实验室)
类型:足式 » 双足人形
应用:科研实验作品
本公司法人或CEO可进行认证领取
所属机构
产品介绍
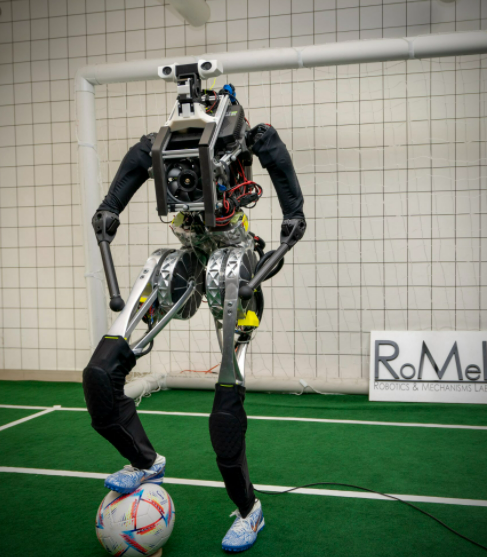
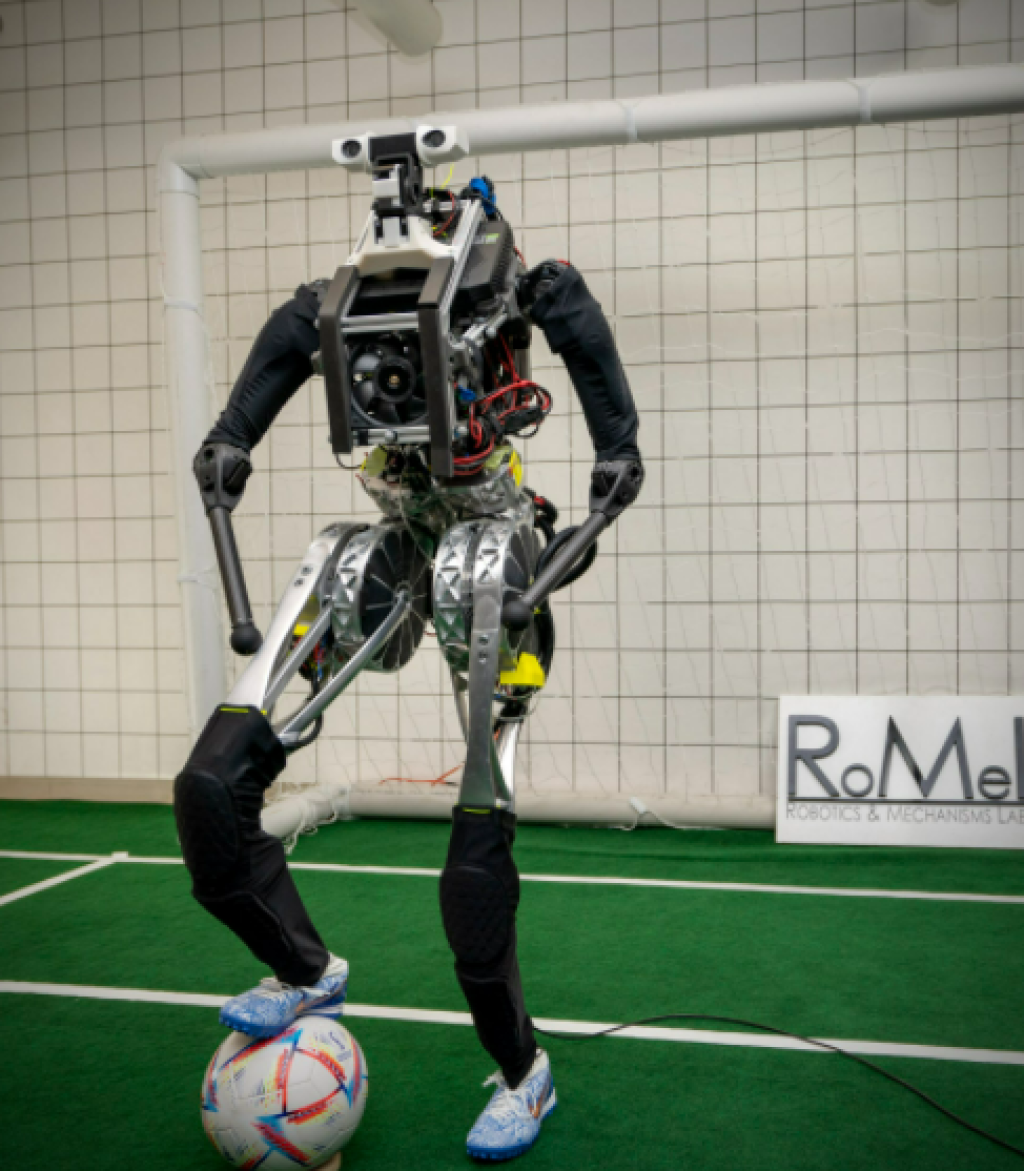
该机器人是由加州大学洛杉矶分校机器人与机构实验室(RoMeLa)的研究人员设计的,是一种通用类人机器人,特长是在不平坦地形上做双足运动。
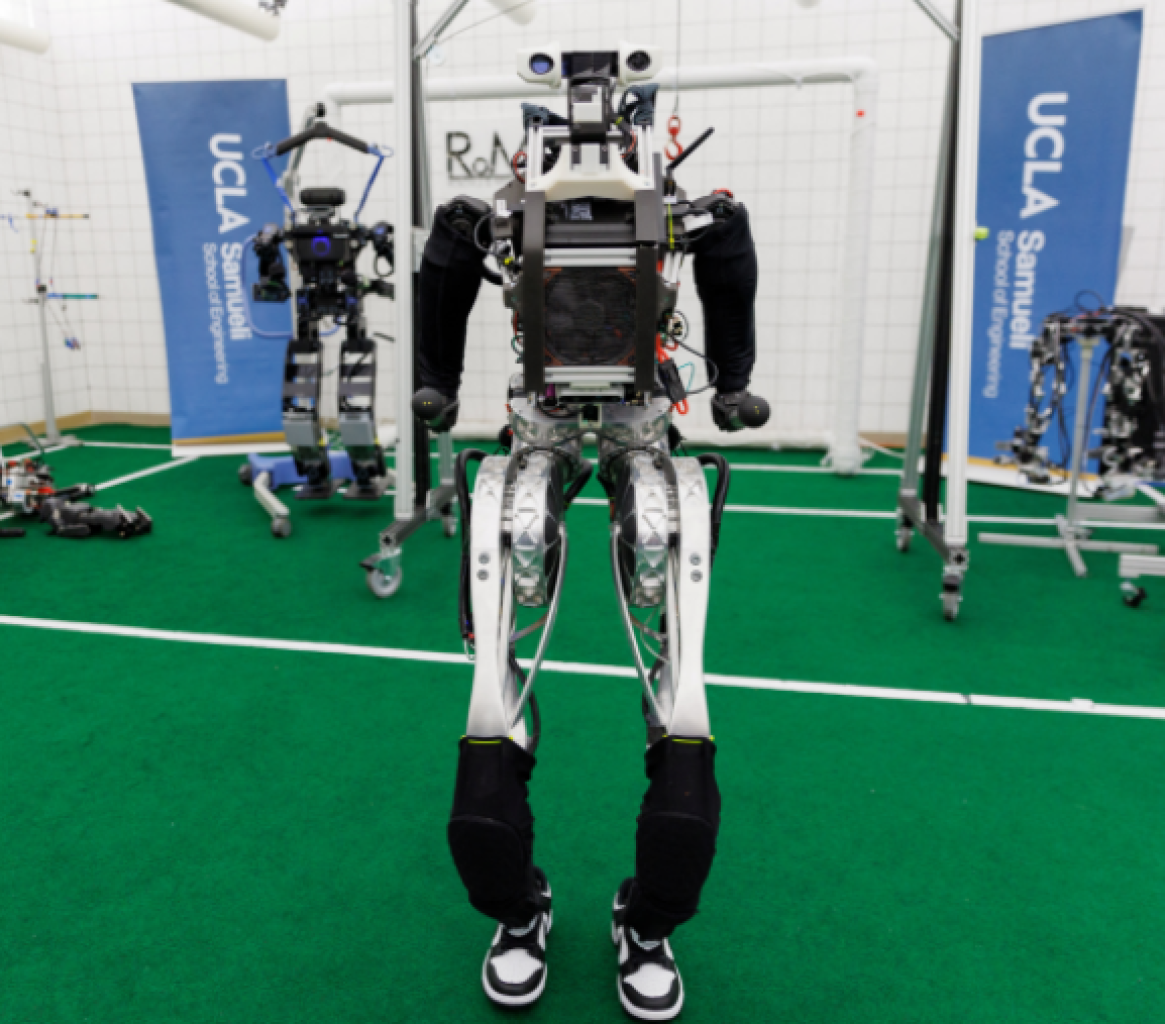
Artemis身高142cm,重38kg,能够在粗糙和不稳定的表面上行走,也能够奔跑和跳跃。即使受到强烈推挤或其他干扰,Artemis也能保持稳定。
每只脚上都有定制设计的力传感器,有助于机器在移动时保持平衡。它的头部还有一个定向装置和摄像头,帮助它感知周围的环境。
行走速度上,研究人员表示,在实验室测试期间,Artemis 的行走速度可达到每秒 2.1 米。
该机器人的主要创新在于其执行器(利用能量产生运动的装置)经过定制设计,其行为类似于生物肌肉。它们具有弹性和力控制,而不是大多数机器人所具有的刚性的、位置控制的执行器。






相关文章
2023-12-30
ucla官网
2023-12-30
teslapronews
2023-06-18
i研报
2023-04-21
Yahoo | Yahoo奇摩(國際通)
2023-03-30
中国科学院自动化研究所
2023-03-25
雪球 | 大数据文摘
2023-03-14
Ebaina | tomato
相关视频
2023-12-30
ucla官网
2023-12-30
teslapronews
2023-06-18
i研报
2023-04-21
Yahoo | Yahoo奇摩(國際通)
2023-03-30
中国科学院自动化研究所
2023-03-25
雪球 | 大数据文摘
2023-03-14
Ebaina | tomato