LOLA
机构:慕尼黑工业大学(Technische Universität München,英文:Technical University of Munich,缩写TUM)
类型:足式 » 双足人形
应用:科研实验作品
本公司法人或CEO可进行认证领取
所属机构

慕尼黑工业大学(Technische Universität München,英文:Technical University of Munich,缩写TUM)
团队:实验室地区:德国
产品介绍
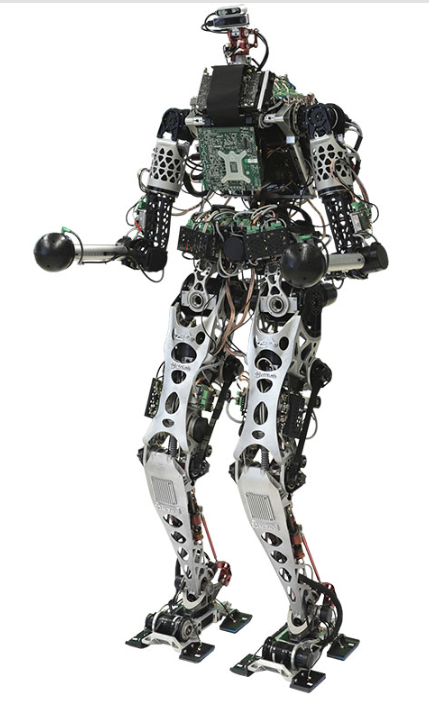
LOLA的人形机器人是慕尼黑工业大学机械工程系正在研究构造的一种能够快速、类似人类自主行走的机器人,他们通过改进视觉感知和步行控制的整合来解决机器人的自主性问题。
LOLA机器人研究的重点是机器人不依赖于人类感知和决策能力的自主性。研究内容包括动力学,实时运动规划控制以及此类系统的设计。
LOLA机器人的腿部设计自由度分别分布在:腿6个自由度,髋关节3,膝盖1,踝关节2。其中,膝关节采用电机+滚珠丝杠传动,踝关节采用电机+同步带+锥齿轮+滚珠丝杠+连杆传动。这两个主要关节的所有驱动均布置于大腿内部,质心高,惯量低,从而为站立和行走时的稳定性提供了物理基础。
为了轻量化,主要结构部件设计为由铝制成的熔模铸件
当前,LOLA可以以1.8 km/h的速度进行多点接触运动并穿越不平坦的地形,以3.38 km /h的速度行走在平坦的地面上。
基本参数:
身高:180厘米
体重:68kg
速度:5公里/小时
硬件:26个电动关节,由无刷直流电动机驱动。





