直驱8自由度并联四足机器人Minitaur
机构:幽灵机器人(Ghost Robotics)
类型:足式 » 四足
应用:科研实验作品
本公司法人或CEO可进行认证领取
所属机构

产品介绍
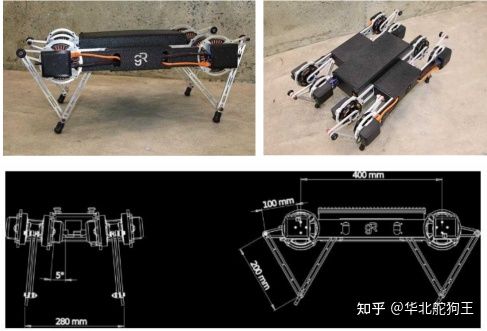
Minitaur是自宾夕法尼亚大学的研究人员制作的一个高性能直驱8自由度并联四足机器人,其开发者主要是 Gavin Kenneally 和 Avik De
Minitaur机器人长 0.4 米,宽 0.28 米,重 4~5kg, 有效载荷 3kg,续航时间 20 分钟。它的奔跑速度为 2.0 米/秒,可以跳到 0.48 米的高度。Minitaur 虽然是一个8自由度的机器人无法侧向移动,由于直驱其腿的力量也不大,但在高效的算法支持下其能实现稳定的Trot步态,Bound步态和Pace步态,另外还能实现后空翻要说最早公开能实现稳定后空翻的四足机器人应该MIT还算不上,另外其还能实现上楼梯甚至开门等特技动作。


相关文章
2022-01-01
古月居
相关视频
2022-01-01
古月居