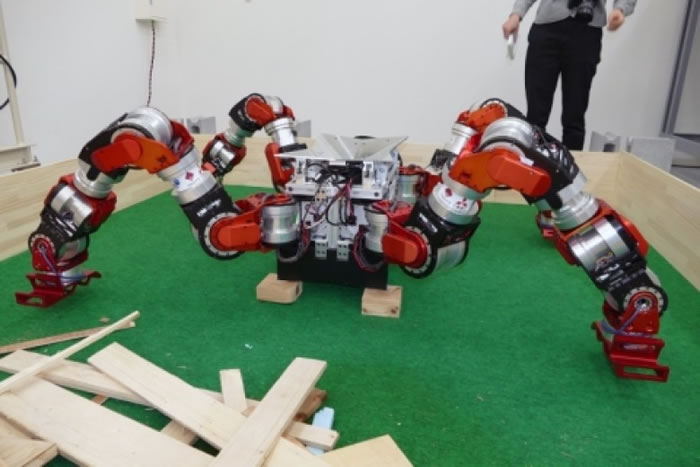
WAREC-1
机构:早稻田大学(Waseda University)
类型:足式 » 四足
应用:探险救灾机器人
本公司法人或CEO可进行认证领取
所属机构

产品介绍


相关文章
2016-11-08
神秘的地球
相关视频
2016-11-08
神秘的地球