Atlas
机构:波士顿动力(Boston Dynamics)
类型:足式 » 双足人形
应用:科研实验作品, 仿人机器人
本公司法人或CEO可进行认证领取
所属机构

产品介绍
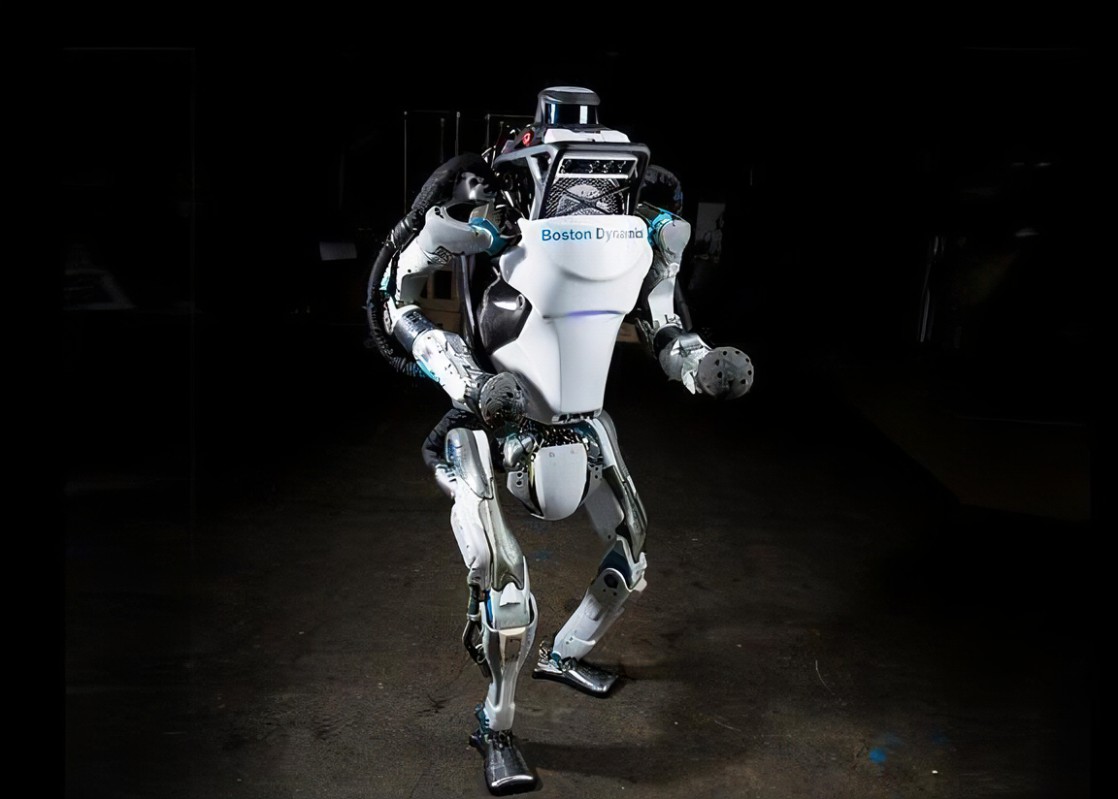
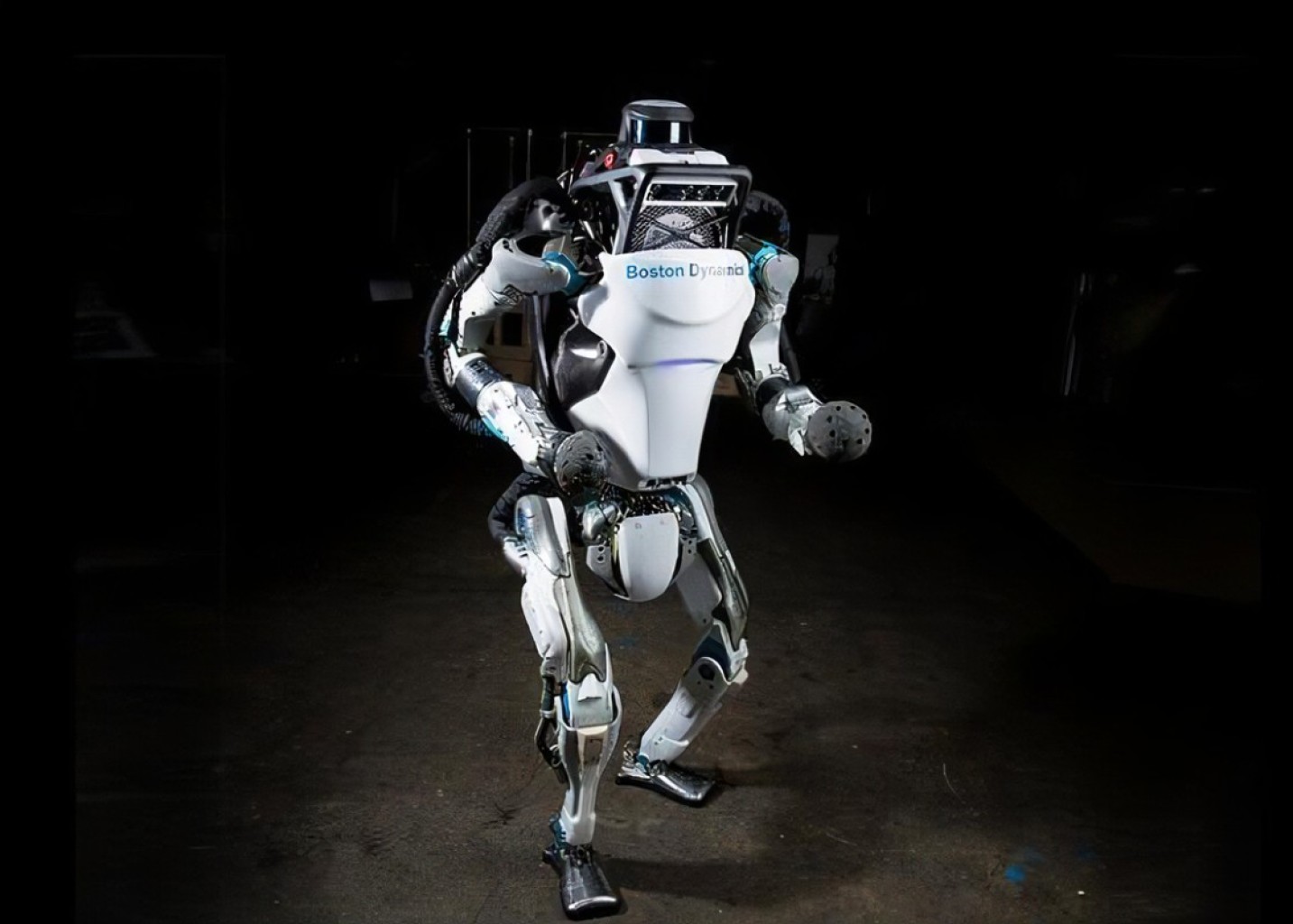
Altas机器人是波斯顿动力的爆款之作,2016年首次亮相以来,一直备受关注。尤其是2020年底发布的Altas跑酷视频和舞蹈视频,其灵活度让人震惊不已,再次将Altas的热度推向了新的高度。该款机器人粉丝无数,一直素有机器人界“跑酷王”之称。
Altas全身的28个自由度均由液压驱动实现(立体视觉摄像头等的运动不计在内),具体表现在:
1. 单腿3个自由度:小腿纵向自由度,大腿纵向自由度,胯部横向自由度
2. 单脚踝2个自由度:横向和纵向自由度。通过双液压缸的联合驱动能够实现纵向、横向、斜向三种运动状态,这三种运动状态可增强行走过程中单腿支撑时腿部的运动能力。
3. 腰腹2个自由度:轴向和径向自由度
4. 单臂6个自由度:肩部轴向和径向自由度,大臂轴向和径向自由度,小臂轴向和径向自由度
-
腕部和机械手:各1个自由度
注:足部踝关节由两个直线执行器并联驱动,髋关节和手臂多是伺服摆动缸
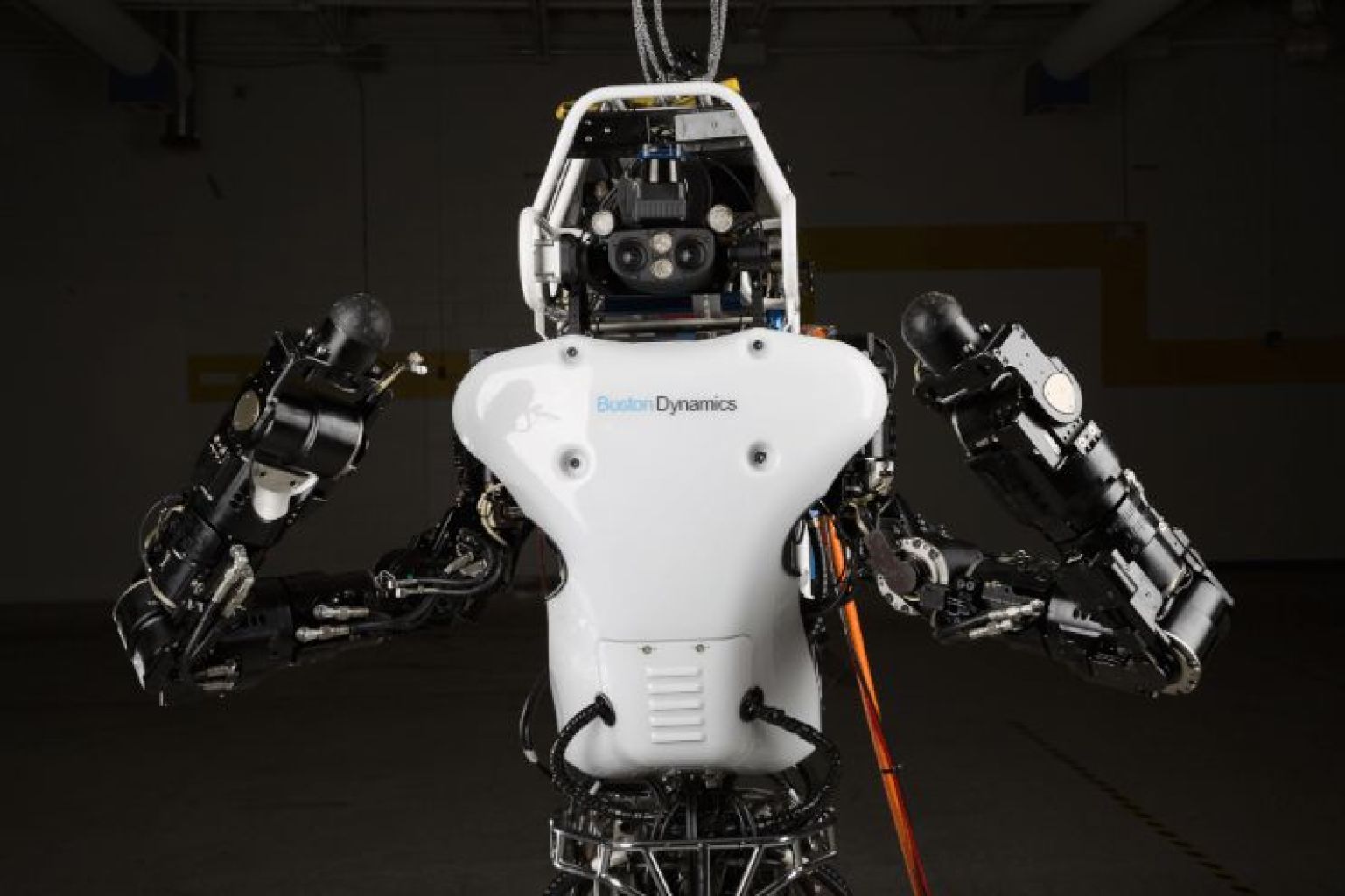
跑酷认知能力:机器人感知算法的目的是将相机和雷达等传感器中的数据转换为对决策制定和规划形体动作有益的东西。虽然 Atlas 使用集成 IMU、联合位置和力传感器来控制自身的肢体动作,并通过感知地面来保持平衡,但它需要利用感知来识别和导航以间隙和窄梁等障碍。
Atlas 使用 TOF 深度相机以每秒 15 帧的速度生成环境的点云,点云是测距的大规模集合。Atlas 的感知软件使用一种名为多平面分割的算法从点云中提取平面。多平面分割算法的输入馈入到一个映射系统中,该系统为 Atlas 通过相机看到的各种不同对象构建模型。
Atlas 控制器被称为模型预测控制器(model-predictive controller, MPC),该控制器使用机器人动力学模型来预测机器人未来的动作。控制器的工作原理是通过优化来计算机器人当前要做的最优事情,从而随着时间的推移产生最佳动作。






相关文章
2024-01-15
RoboCatz
2023-09-25
维基百科
2023-01-20
Ars Technica
2023-01-19
Designboom
2021-09-03
澎湃 | 智东西
2021-08-27
EDN
2013-07-12
MIT Technology Review
相关视频
2024-01-15
RoboCatz
2023-09-25
维基百科
2023-01-20
Ars Technica
2023-01-19
Designboom
2021-09-03
澎湃 | 智东西
2021-08-27
EDN
2013-07-12
MIT Technology Review
相关资料
2015-11-01
IEEE-RAS 国际人形机器人会议
2014-11-01
IEEE-RAS 国际人形机器人会议