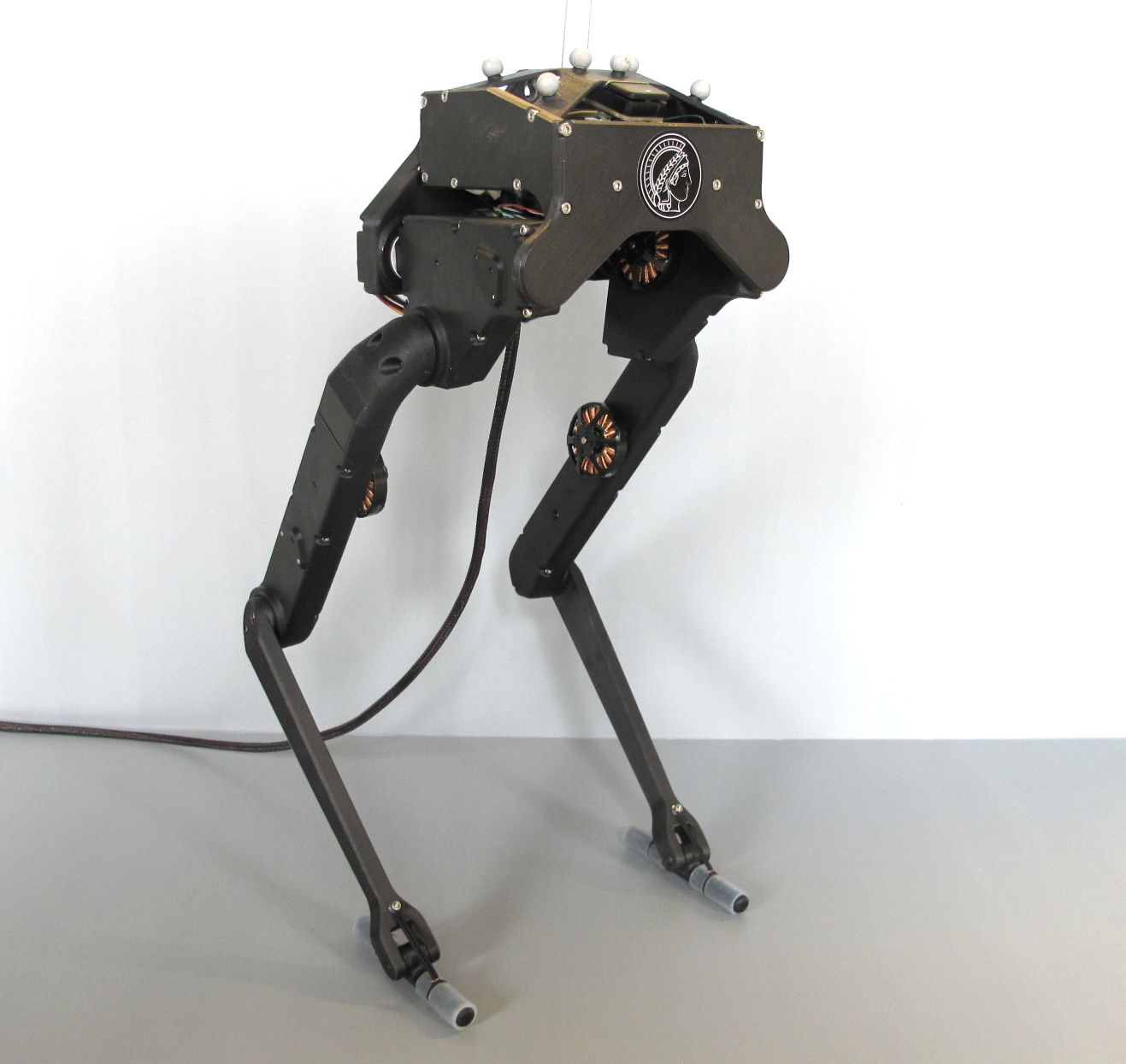
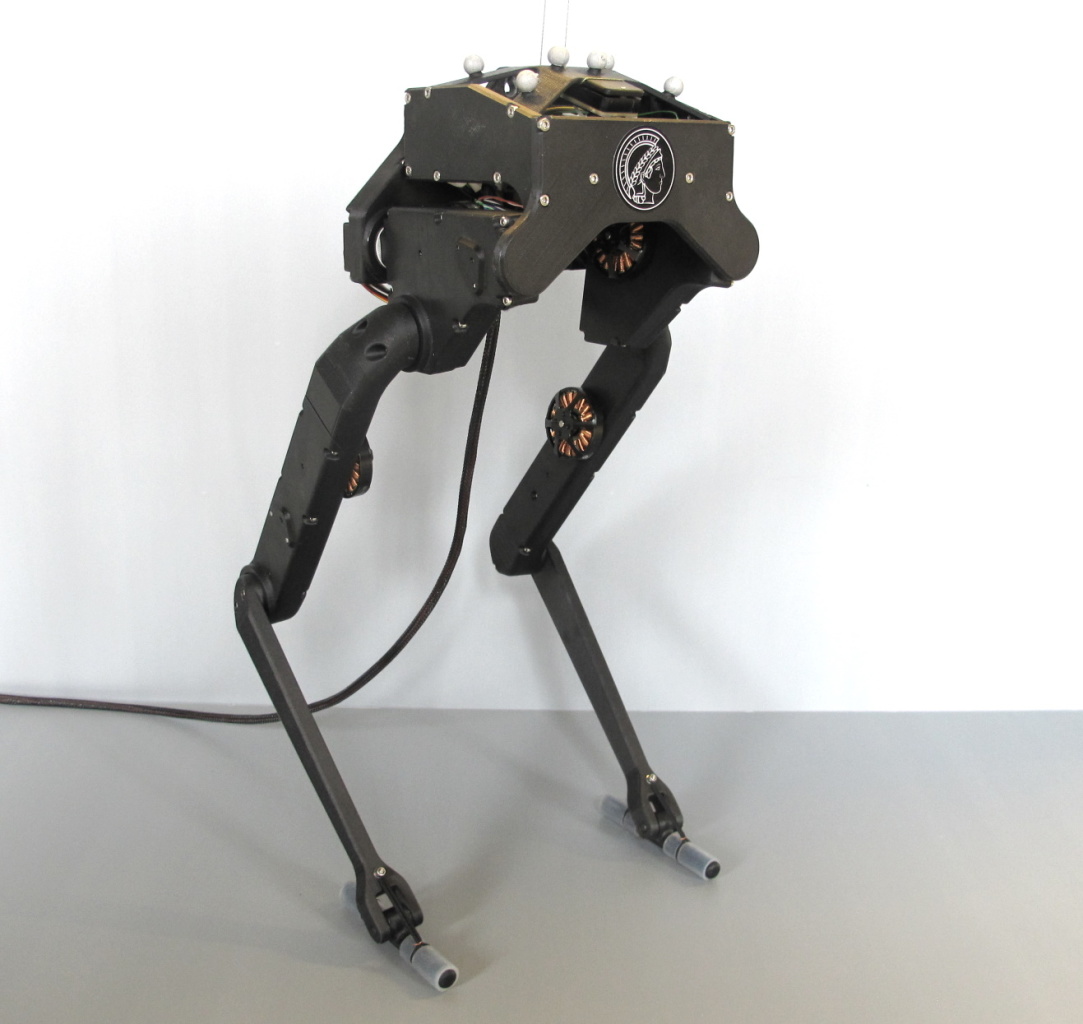
6dof v1
类型:足式 » 双足非人形
应用:开源机器人
本公司法人或CEO可进行认证领取
所属机构
6dof v1





相关文章
2022-07-19
Github