废墟搜救可变形机器人
机构:机器人学国家重点实验室(State Key Laboratory of Robotics)
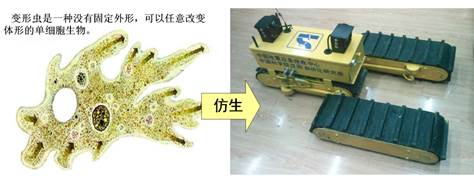
类型:履带式差速机械机构
应用:勘探巡逻机器人, 探险救灾机器人, 科研实验作品
本公司法人或CEO可进行认证领取
所属机构

机器人学国家重点实验室(State Key Laboratory of Robotics)
团队:实验室地区:中国地区:中国 » 辽宁
产品介绍






相关文章
2018-07-27
中国科学院沈阳自动化研究所