Cassie 第一代
机构:敏捷机器人公司(Agility Robotics.)
类型:足式 » 双足非人形
应用:运输配送机器人, 探险救灾机器人, 科研实验作品, 仿人机器人
本公司法人或CEO可进行认证领取
所属机构

产品介绍
Cassie 是一个动态的双足机器人,可以以类似于人类或动物的方式行走和奔跑。
它的特点是:
1、步伐稳健、精准,可适应各种路面,能用于科学研究,灾难救援,货物运输。
2、可以处理多样化和复杂的地形,非常适合搜索和救援或包裹递送。
3、坚固耐用,无需安全绳即可在户外进行实验。
4、非常节能,一次充电即可运行数小时。
Cassie 是敏捷机器人公司的第一款产品,在 2017 年至 2019 年间出售。
Cassie是根据ATRIAS的设计原则进行工程优化的结果。
基本参数:
HEIGHT:115 cm | 45.3 in
LENGTH:40 cm | 15.75 in
WIDTH:55 cm | 21.6 in
WEIGHT:31 kg | 12.2 lb
SPEED:5 km/h | 3.1 mph (Walking speed using prototype stepping control)
具体结构分析如下:
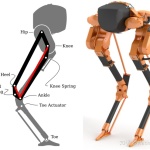
Cassie只有脚的驱动是连杆机构,我们所能看到的上端的连杆并不是驱动连杆。
整个Cassie腿部上半部分是一个六杆机构,如下图所示。当然,此处所谓的六连杆是将板簧的变形也等效为了一个转动关节。如果将弹簧考虑为刚体,则其腿部结构如图中红线所示。
由此可见,Cassie的上半部分连杆不是用来传递驱动力,那它的作用是什么呢?
根据Cassie设计的理念,为了减少对电机的冲击,Cassie的膝关节和踝关节(请注意这里所说的膝关节和踝关节并不是直观上对比人体结构的膝关节踝关节,具体情况图里标识)都安装有板簧。Hip和Heel间连杆的上端旋转中心是髋Pitch旋转方向的中心,当然此处可以自由旋转。当脚与地面产生冲击时,如果没有板簧连接在下肢,冲击力将通过腿部结构传给电机,必须控制电机产生相应的力去抵消冲击。当板簧连接下肢和电机中心后,该部分力将通过板簧、连杆(与电机中心轴连接)传到上部,弹簧不仅减震,而且将转移部分力由整个结构承担,而不仅仅依靠电机。膝关节弹簧类似。