开源者介绍: B站up主 华北舵狗王 学校:北京理工大学 控制科学与工程博士 舵狗之家:QQ群567423074
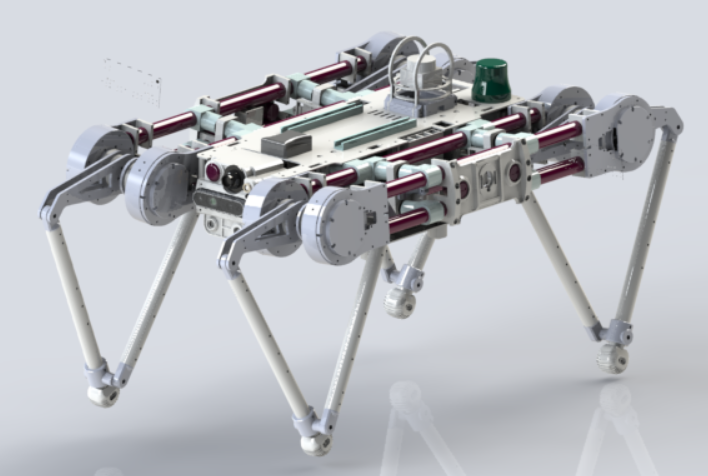
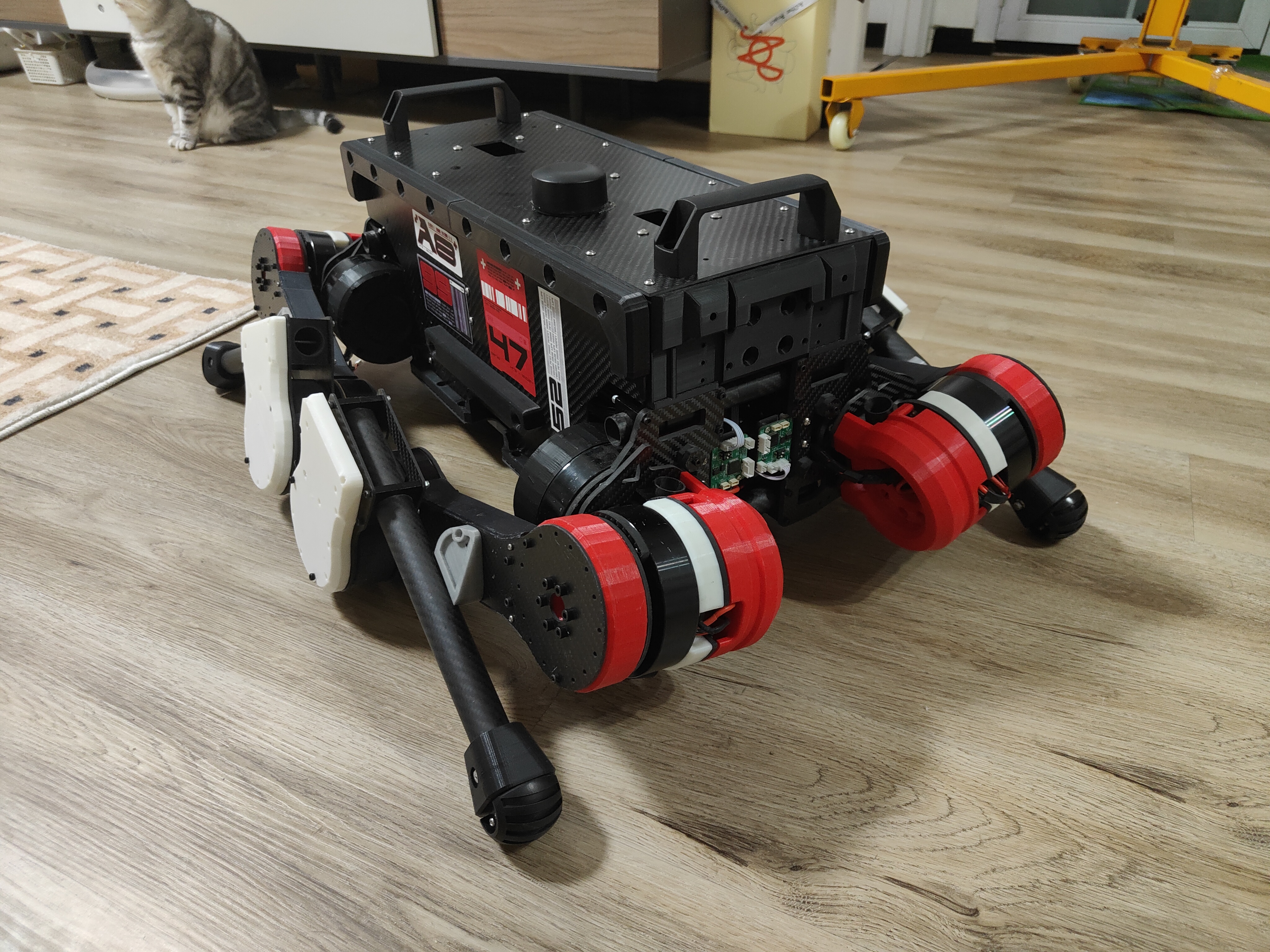
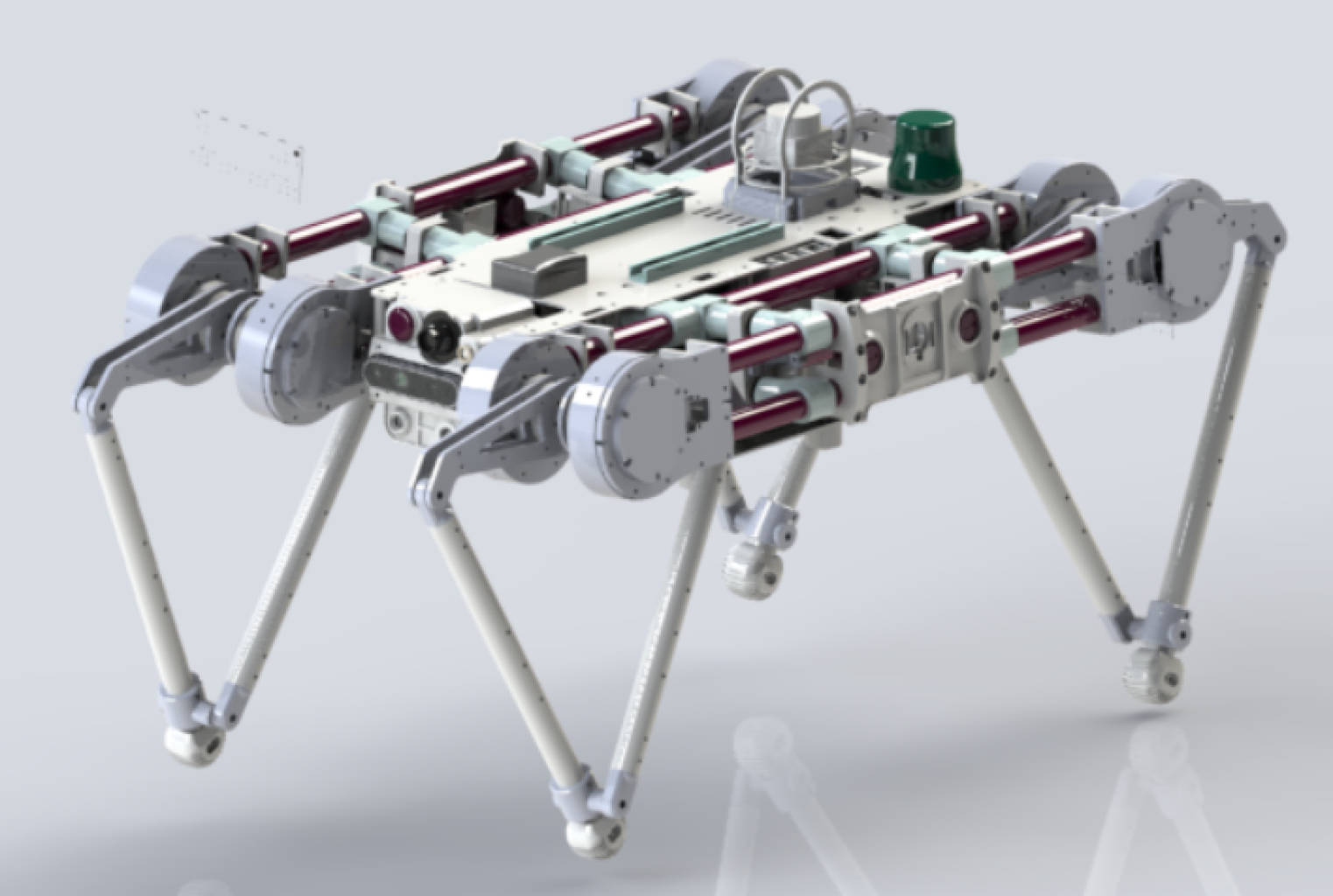
产品介绍: 8自由度并联的开源足式机器人 优点:侧向稳定性高,不容易摔倒,结构对称简单 缺点:摆动运动空间不足,足端力关节部分存在耦合,横滚控制耦合欠驱动