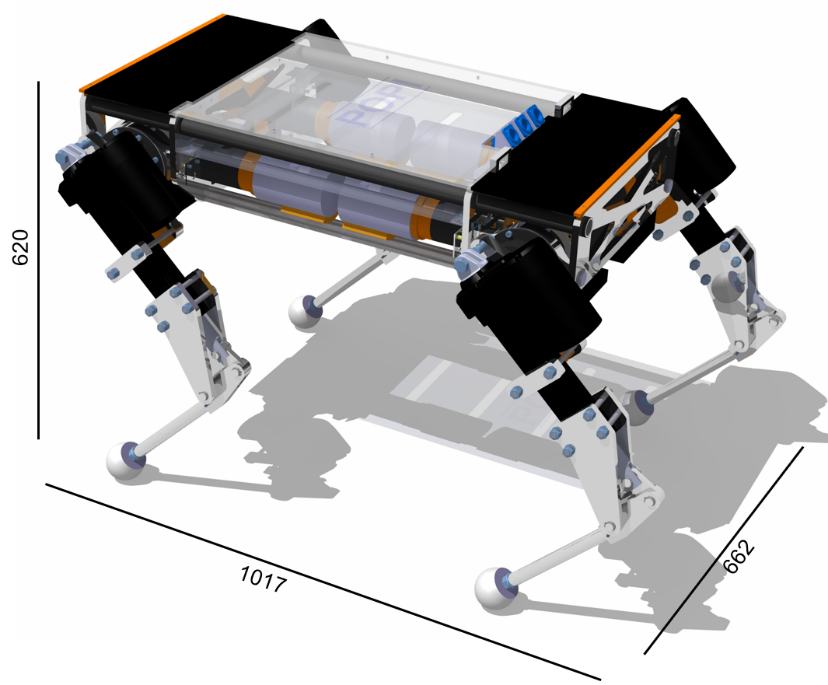
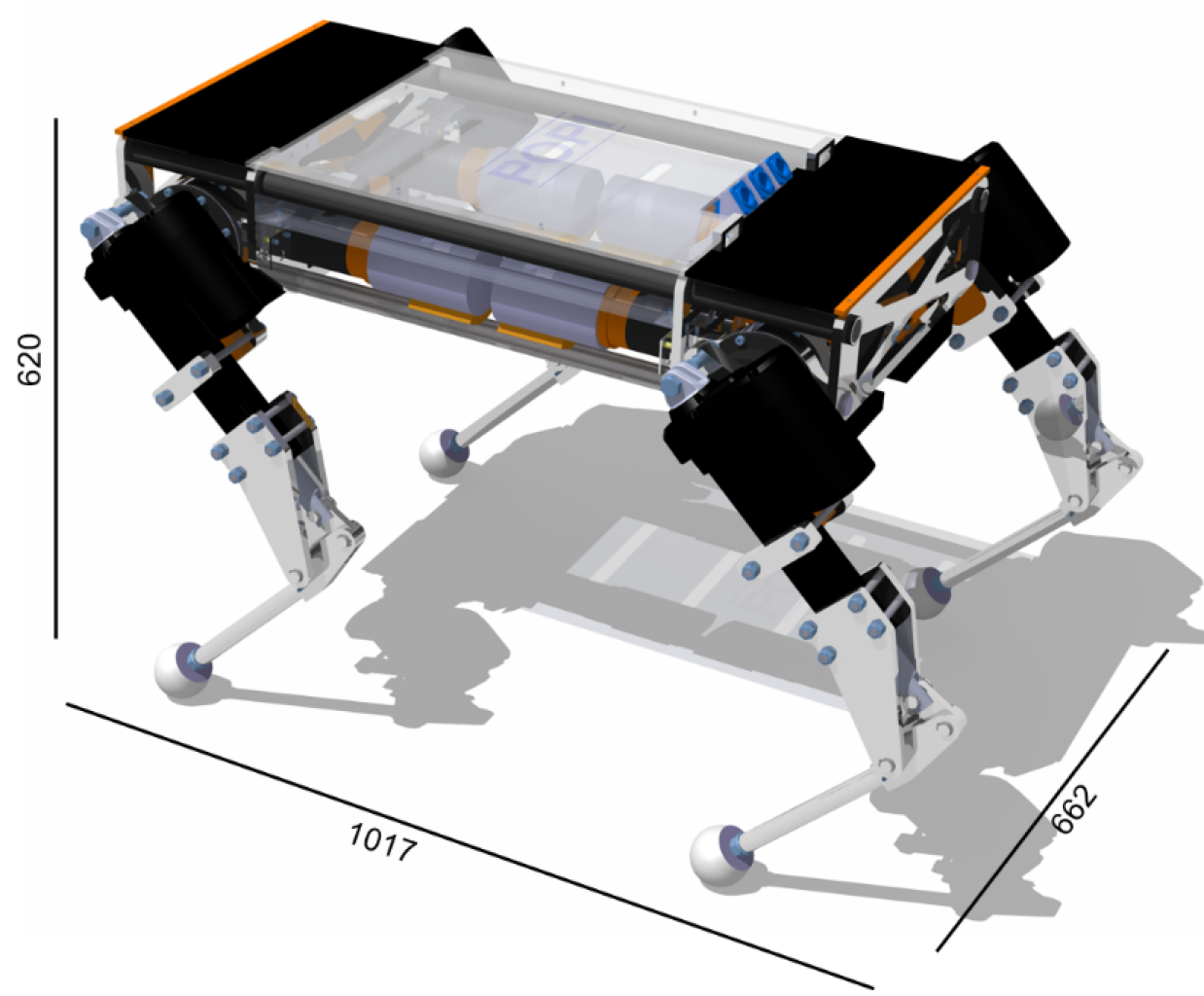
机器人介绍: POPI是一个完全开源的四足机器人。该项目最初是作为学生作品开始的。由10个未毕业的工程师学生团队用6个月构建和设计。 开源者介绍 由在IMT Mines d'Alès学习机电一体化工程的10人团队制作。项目负责人是Clément Thomaso。电子邮箱是popi.mkx3@gmail.com