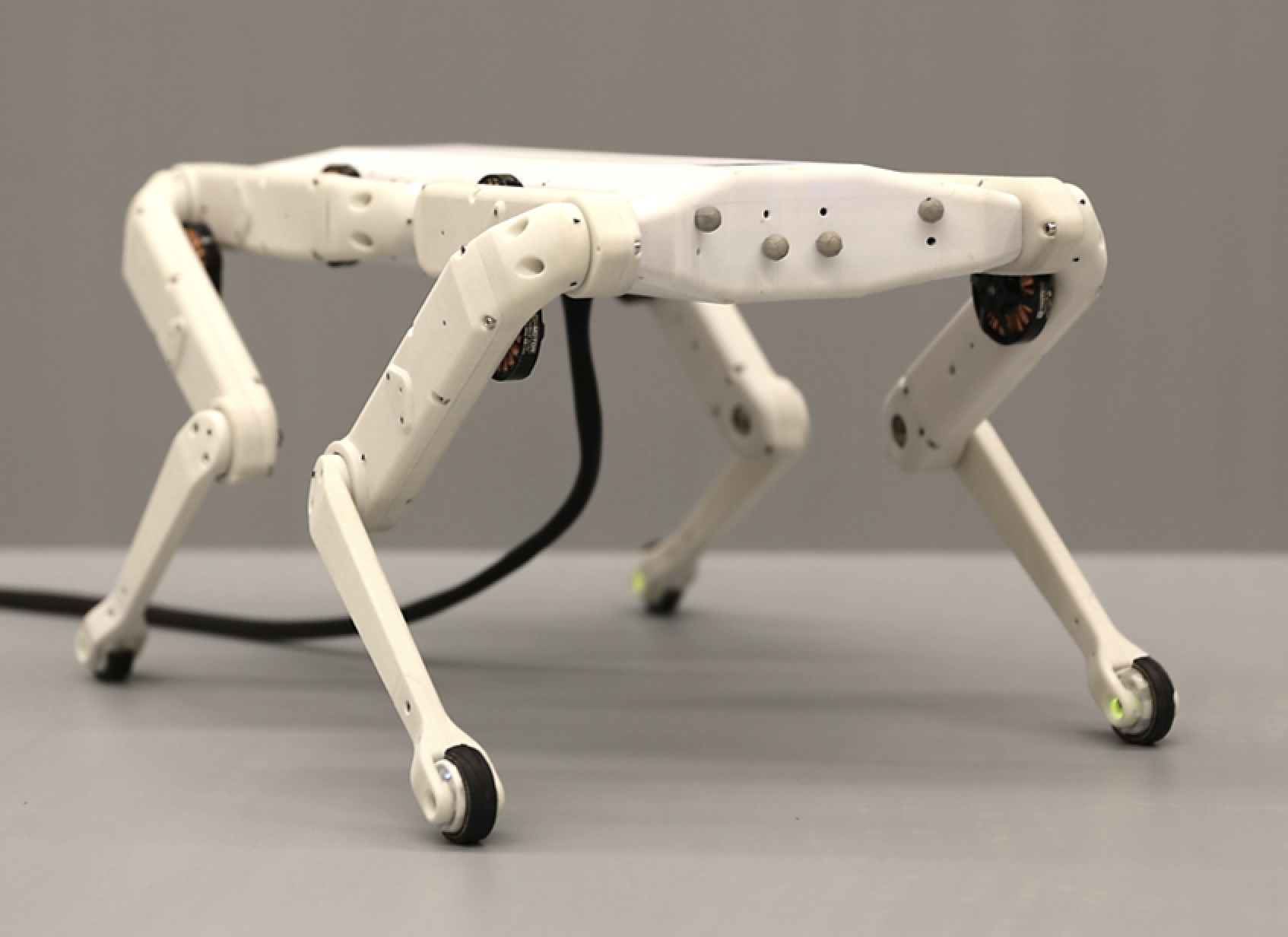
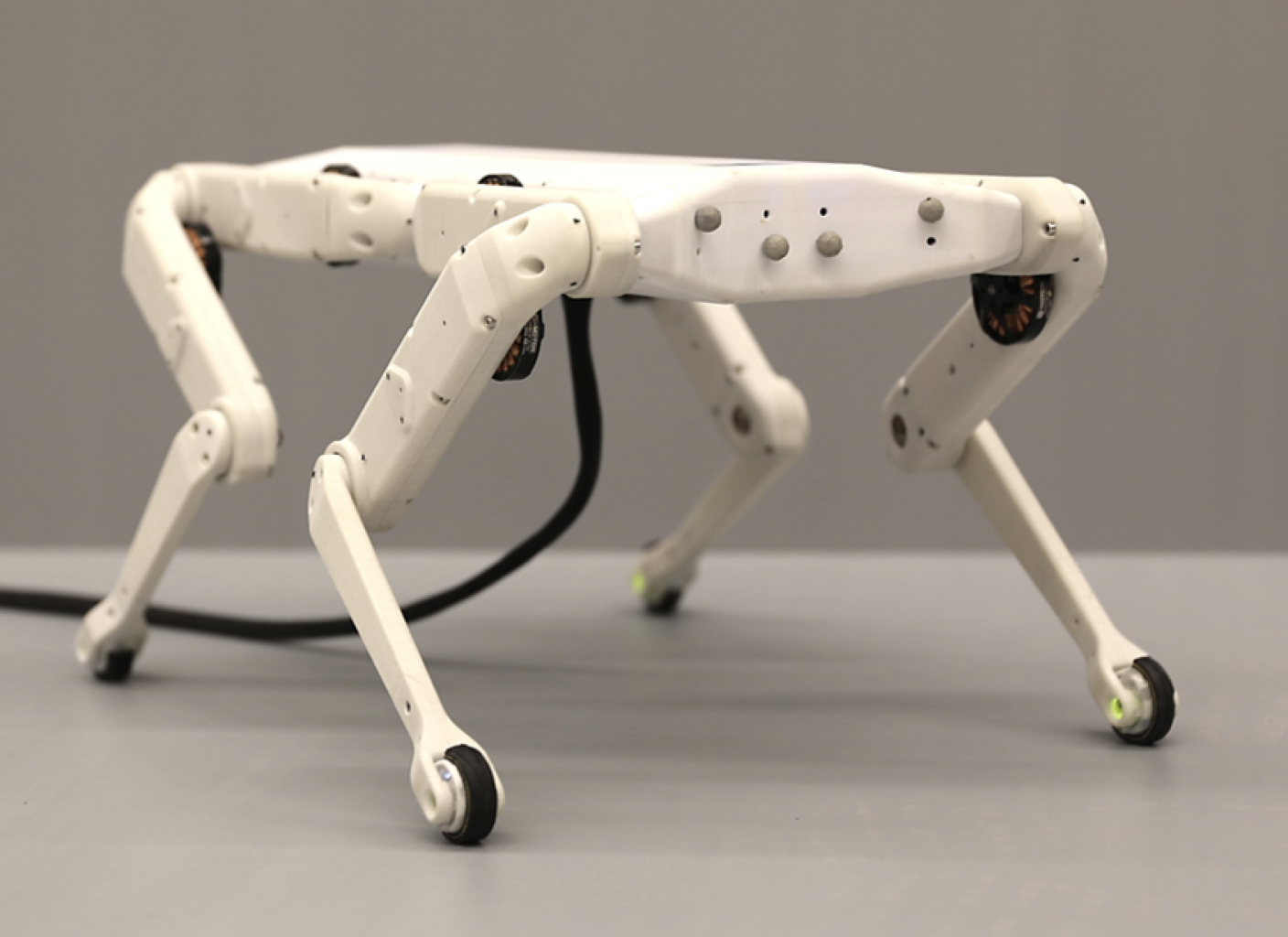
机器人介绍: 一种新的开源扭矩控制腿式机器人系统,其核心是低成本和低复杂性的执行器模块。这款开源机器人由一个高扭矩无刷直流电机和一个适用于阻抗和力控制的低齿轮比变速器组成。 开源者介绍: 这项工作是在运动生成和控制小组,动态运动小组和马克斯 - 普朗克智能系统研究所的机器人中央科学设施,纽约大学Tandon工程学院的运动机器实验室和LAAS / CNRS的Gepetto团队之间合作完成的。