Felin
类型:足式 » 四足
应用:开源机器人
本公司法人或CEO可进行认证领取
所属机构
Felin
产品介绍
机器人介绍:
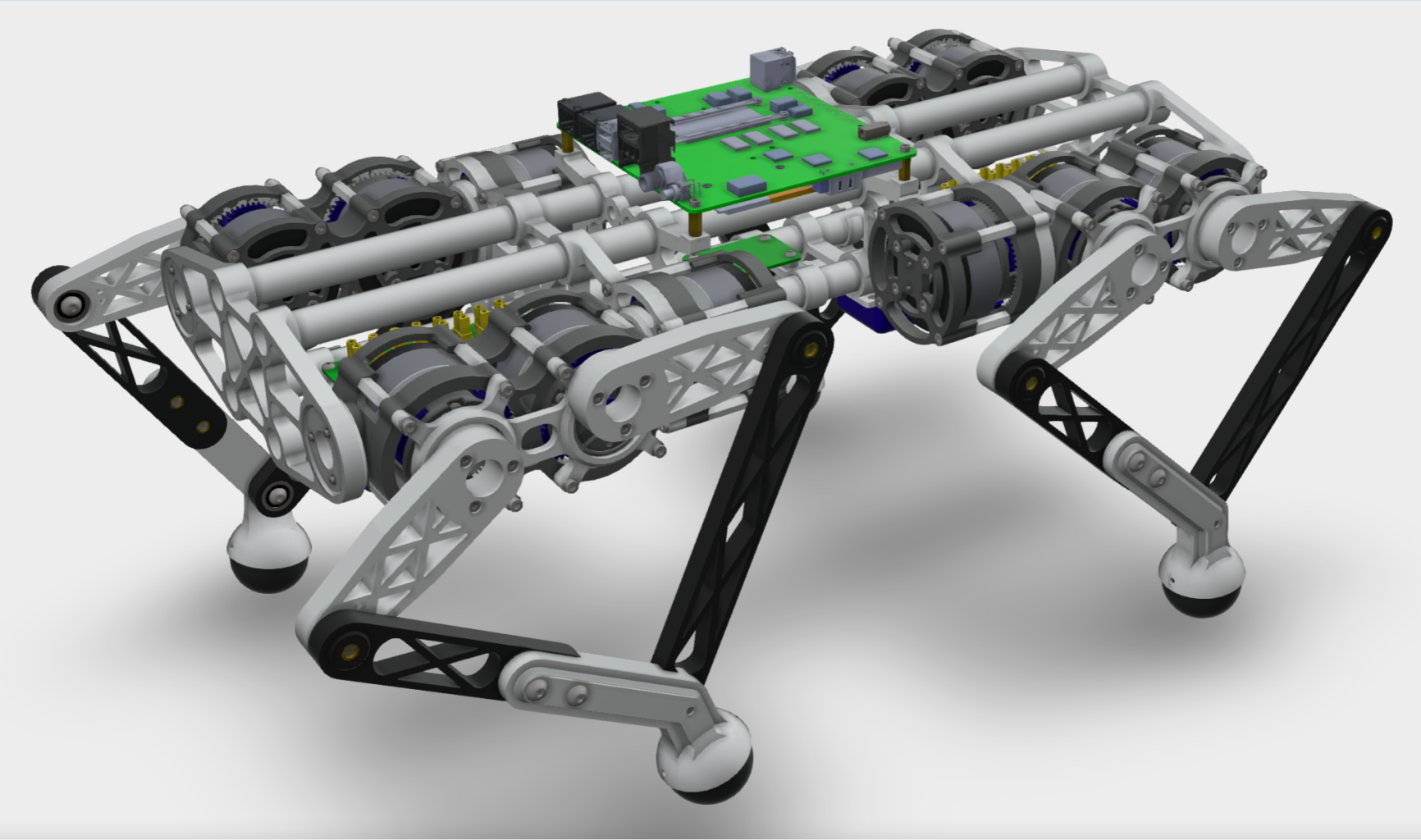
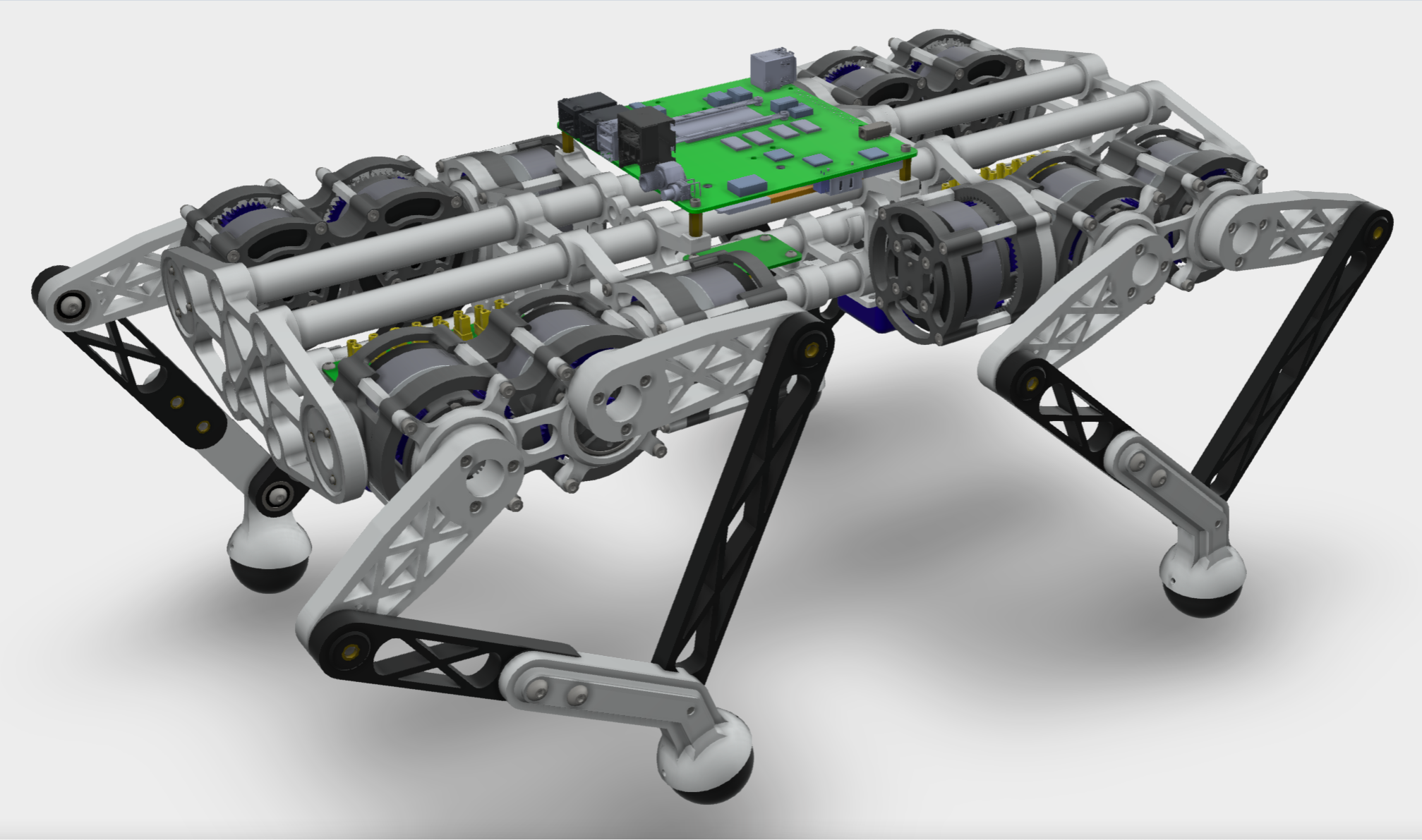
“Felin”是一款小型12-DoF腿式机器人,采用准直接驱动无刷执行器。它的大部分部件,包括外摆线齿轮箱,都是使用FDM 3D打印机和PLA打印的。
这款四足动物有四条轻质支腿,基于5巴机制。每条腿有两股骨和两个胫骨。髋部的两个致动器控制股骨角度,膝盖只是自由关节。
该机器人采用B-G431B-ESC无刷伺服控制器,这是一个开源的副项目,带来了“基于意法半导体B-G431B-ESC1发现套件的超低成本无刷伺服控制器”。FOC 算法以 40KHz 的频率运行,具有可编程 PD 位置/速度和 PI 电流控制。
还开发了一个“Felin”ROS节点,实现简单的3-DoF小跑步态和6-DoF姿态控制。机器人由无线蓝牙游戏手柄(类似PS3)远程控制。步态算法仍然低于
开源者介绍:
由帕特92fr、Ex3n0n、理查德·威尔、BenjDC、SurLeChiOuaOua,5人团队合力开发
项目负责人YOUTUBE主页:https://www.youtube.com/user/xterminhate/videos