
本公司法人或CEO可进行认证领取
实验室介绍
机器人学国家重点实验室(State Key Laboratory of Robotics)依托于中国科学院沈阳自动化研究所,前身是中国科学院机器人学开放实验室。






南极科考地面机器人
机构:机器人学国家重点实验室(State Key Laboratory of Robotics)类型:轮式 » 四轮应用:运输配送机器人, 勘探巡逻机器人
南极科考地面机器人团队针对南极科考中的探路、运输、探测、采样等多样化需要,主要开展自身安全型探路机器人、运输车辆无人化改造、作业型科考机器人等研究。
研究的关键技术包括:
(1)适应冰雪地面环境的移动机构与轨迹控制技术
(2)基于多传感器信息融合的冰雪裂隙识别技术
(3)高纬度环境下的自主定位定姿与导航
(4)低温冰雪环境中的作业机械手臂
(5)传统车辆的无人驾驶改造技术
取得的主要成果包括:
(1)研制出我国第一台南极冰雪面移动机器人验证样机
(2)完成了我国地面机器人在南极内陆冰盖的首次30公里自主行走测试
(3)研制出我国第一套南极内陆冰结构勘查机器人系统并进行应用
(4)研制出我国第一套南极探路机器人系统并投入实际应用
(5)研制出南极科考地面机器人5套,其中4套完成现场试验






轮腿复合式移动机器人
机构:机器人学国家重点实验室(State Key Laboratory of Robotics)类型:轮式 » 六轮应用:运输配送机器人, 勘探巡逻机器人, 运输配送机器人
地形环境的自主适应性,是野外环境下移动机器人的重要考核指标。
针对野外复杂地形环境,轮腿复合式移动机器人团队的研究思路是,以轮腿复合式移动机构为运动本体,借助感知、规划、协调控制技术实现轮腿复合式移动机构的高机动、高通过性以及过程控制的自主性,提高机器人对野外复杂地形环境的主动适应性。
研究的关键技术有:
(1)轮/腿/减振复合式移动机构及控制
(2)野外典型障碍地形环境自主感知与识别
(3)面向典型障碍地形的移动机构构型优化
(4)基于轮腿协调的构型与运动控制。
团队目前已研制出300kg 级样机2套,3000kg 样机1套,并完成了相关技术验证。

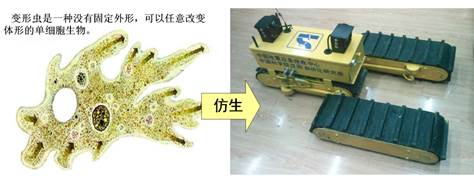
废墟搜救可变形机器人
机构:机器人学国家重点实验室(State Key Laboratory of Robotics)类型:履带式差速机械机构应用:运输配送机器人, 勘探巡逻机器人, 运输配送机器人, 勘探巡逻机器人, 探险救灾机器人, 科研实验作品
废墟搜索可变形机器人是一种用于地震灾害救援的机器人,可以根据任务的类型及环境改变自身的构型,适应更多种地震废墟。
它可进入废墟内部,利用自身携带的红外摄像机、声音传感器将废墟内部的图像、语音信息实时传回后方控制台,供救援人员快速确定幸存者的位置及周围环境,同时,为实施救援提供救援通道的信息。
该机器人在我国四川芦山地震灾害现场首次使用,协助国家地震紧急救援队完成了多处废墟和危楼的生命搜索排查和灾情勘察任务,有效地提高了搜索救援行动的效率。
该机器人是我国首次进入地震救援现场的机器人,也是我国第一台执行废墟救援任务的机器人。






生命探测机器人
机构:机器人学国家重点实验室(State Key Laboratory of Robotics)类型:履带式差速机械机构应用:运输配送机器人, 勘探巡逻机器人, 运输配送机器人, 勘探巡逻机器人, 探险救灾机器人, 科研实验作品, 勘探巡逻机器人, 探险救灾机器人, 科研实验作品
本生命探测机器人系统是针对地震灾后复杂救援环境研发的。
该机器人具有自主知识产权的小型生命探测机器人装备,移动机构采用模块化链式结构,保证了复杂地形通过能力,可变换成三角形、D字型、并排型等3种构型适应任务和作业环境的需求。
融合生命探测雷达、视频、音频信息的生命探测技术,可穿透非金属介质,实现幸存者呼吸、体动生命体征的探测。
该机器人最大特点能够由狭窄入口深入废墟内部,穿透遮挡物探测幸存者,有效的提高的探测深度以及作业效率,降低救援人员的上网。






地面无人车系统
机构:机器人学国家重点实验室(State Key Laboratory of Robotics)类型:轮式 » 四轮应用:运输配送机器人, 勘探巡逻机器人, 运输配送机器人, 勘探巡逻机器人, 探险救灾机器人, 科研实验作品, 勘探巡逻机器人, 探险救灾机器人, 科研实验作品, 科研实验作品
在地面移动机器人方向,团队致力于能在沙地、冰川等野外非道路环境下的地面机器人系统的研发。
经过多年技术攻关,该机器人实现了地面非结构化环境的实时三维感知与理解、实时导航与定位、实时行为规划与决策等功能,显著提升了地面移动机器人在非道路环境下的自主行为能力。

空地协作室外反恐防暴机器人系统
机构:机器人学国家重点实验室(State Key Laboratory of Robotics)类型:履带式差速机械机构应用:运输配送机器人, 勘探巡逻机器人, 运输配送机器人, 勘探巡逻机器人, 探险救灾机器人, 科研实验作品, 勘探巡逻机器人, 探险救灾机器人, 科研实验作品, 科研实验作品, 安保巡逻机器人, 勘探巡逻机器人, 军事辅助机器人, 科研实验作品
空地协作室外反恐防暴机器人系统,用于野外环境大范围侦查排爆,具有自主伴飞,携行,协同排险等功能。

灵蜥HW55机器人
机构:机器人学国家重点实验室(State Key Laboratory of Robotics)类型:足式 » 四足应用:运输配送机器人, 勘探巡逻机器人, 运输配送机器人, 勘探巡逻机器人, 探险救灾机器人, 科研实验作品, 勘探巡逻机器人, 探险救灾机器人, 科研实验作品, 科研实验作品, 安保巡逻机器人, 勘探巡逻机器人, 军事辅助机器人, 科研实验作品, 安保巡逻机器人, 军事辅助机器人, 科研实验作品
灵蜥 HW55机器人,主要用于室内和城市环境反恐排险。
该机器人具有上下楼梯,越障,通过沟壑等能力。
此外,这款机器人还具有转移和拆解爆炸物的功能。

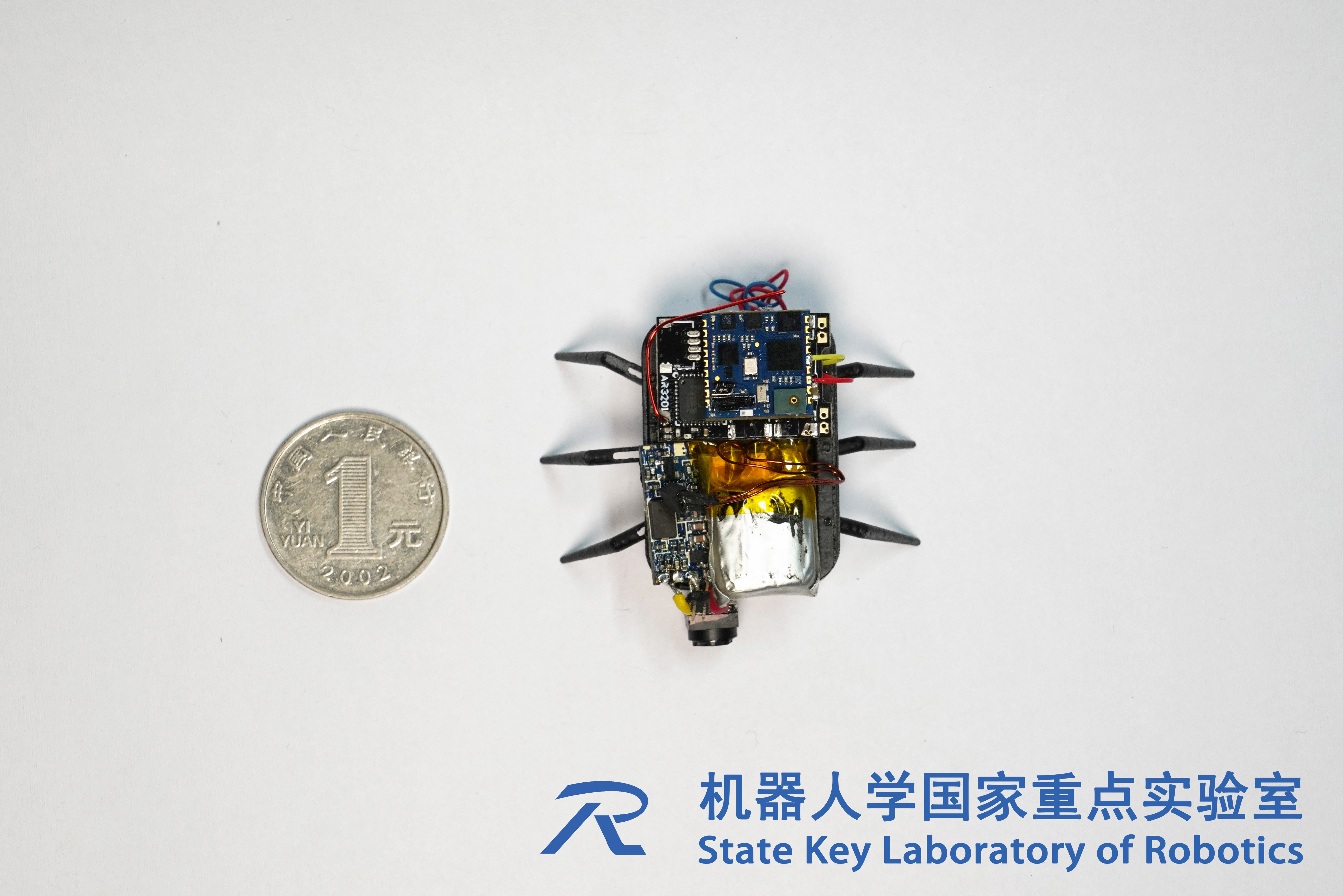
微型爬行机器人
机构:机器人学国家重点实验室(State Key Laboratory of Robotics)类型:足式 » 六足应用:运输配送机器人, 勘探巡逻机器人, 运输配送机器人, 勘探巡逻机器人, 探险救灾机器人, 科研实验作品, 勘探巡逻机器人, 探险救灾机器人, 科研实验作品, 科研实验作品, 安保巡逻机器人, 勘探巡逻机器人, 军事辅助机器人, 科研实验作品, 安保巡逻机器人, 军事辅助机器人, 科研实验作品, 勘探巡逻机器人, 科研实验作品
微型爬行机器人研究方向,重点开展了微型仿昆虫高机动运动平台研究,其中包括:微型机器人高效驱动控制算法,六足仿生多模步态机理分析与步态规划研究,基于多支链腿足的仿生爬行机构,腿足纳米结构及其高效环境交互机理,微型电磁驱动装置的控制系统,基于视觉的SLAM算法与位置控制,单目小叶巨细胞避障算法,CPG中枢模式发生器步态控制算法等。
这款机器人研制了集成电池、控制、底盘、驱动、通讯和音视频采集模块的高机动性微型爬行装置。
技术参数如下:
(1)机器人机身长度3.5cm,宽度2.5cm
(2)机器人最大爬行速度175mm/s即5倍体长
(3)负载能力大于2g
机器人具有较快的爬行速度和较好机动性能,能够实现直线、圆弧等轨迹爬行运动,最小转弯半径约3cm,可携带微型摄像头及图传实现音视频采集功能。






相关文章
2022-05-31
机器人学国家重点实验室官网
2022-05-31
机器人学国家重点实验室官网
2021-09-30
机器人学国家重点实验室官网