
企业介绍
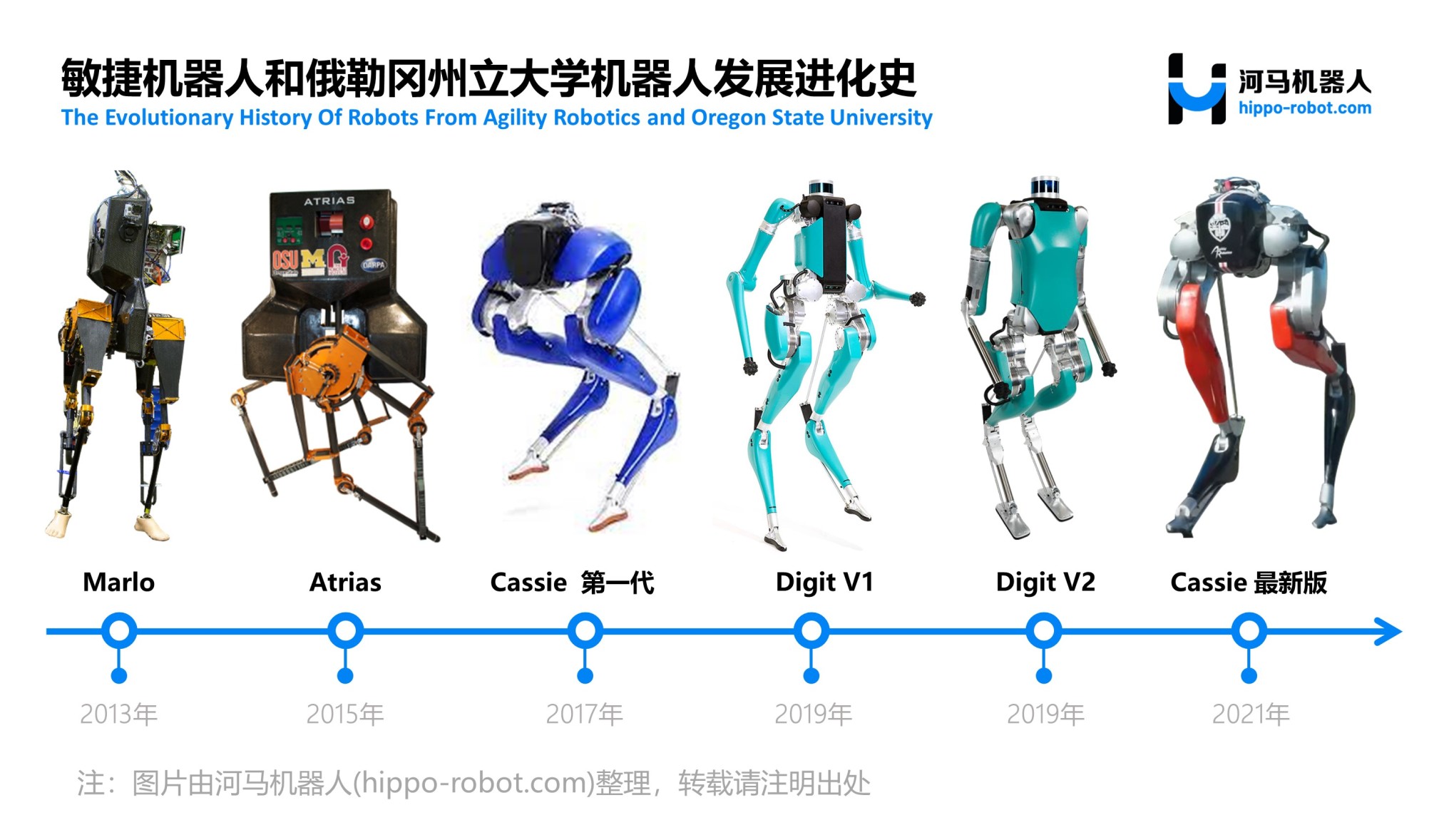
Agility Robotics 是从俄勒冈州立大学(OSU)拆分出来的机器人公司,成立于 2015 年,为物流、远程呈现、自动检查、娱乐和研究等应用开发功能强大的双足机器人。曾经获得过美国国防部高级研究计划局的资助。
「Agility」目前的业务重心是卸载货车、搬运箱子、管理货架等仓储工作。
该公司的目标是制造可以去任何人可以去的任何地方的腿式机器。它的第一个机器人于 2016 年发布,是一个名为 Cassie 的双足平台,这是一种动态步行机器人,可以穿越崎岖地形并越过障碍物。 Digit 于 2019 年推出,是 Agility 的第二款机器人。它的腿与 Cassie 的相似,但 Digit 配备了一个充满传感器的躯干以及一对手臂,用于平衡、移动和操纵。





DIGIT V2
机构:敏捷机器人公司(Agility Robotics.)类型:足式 » 双足人形应用:工业机器人, 运输配送机器人
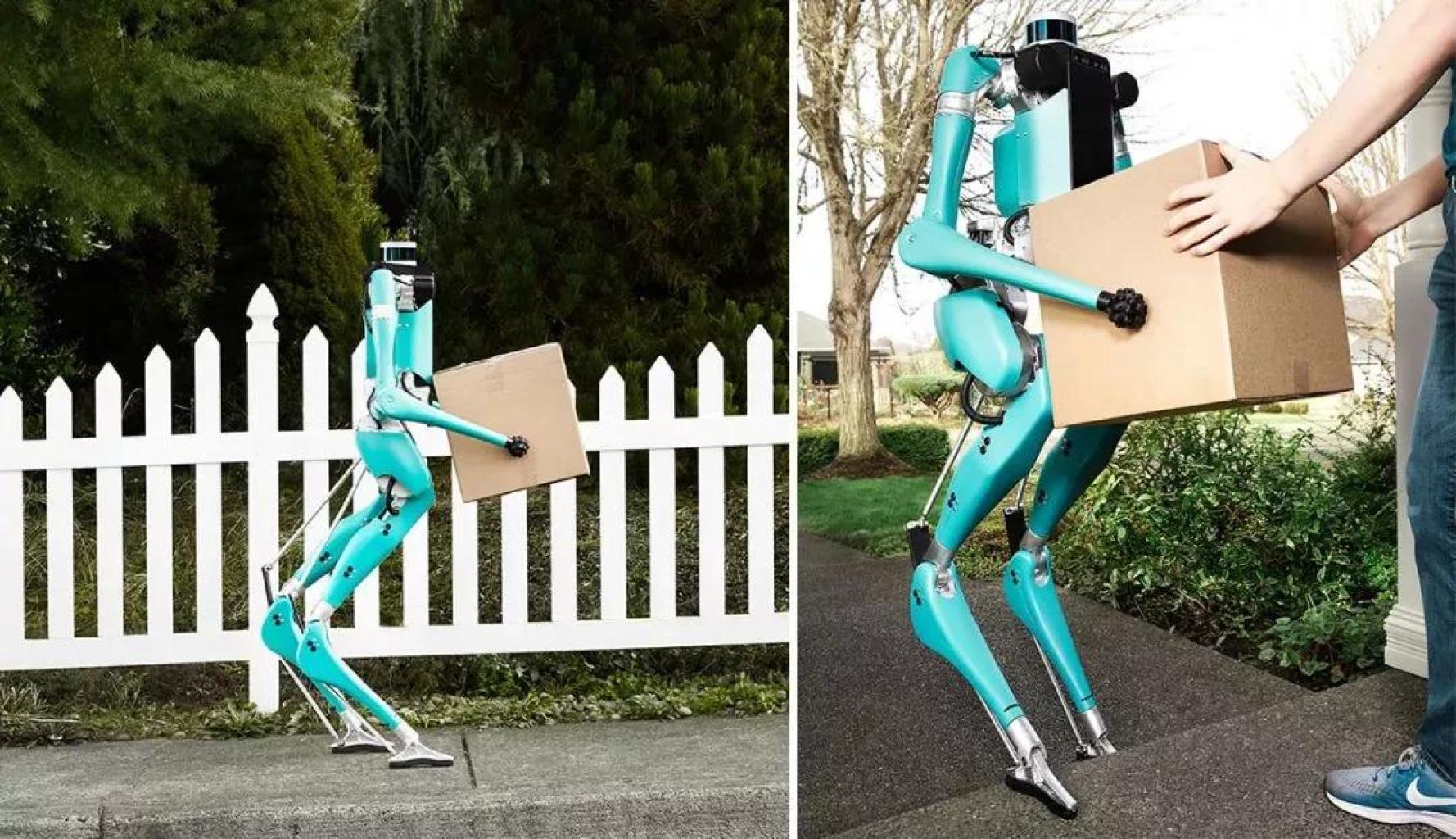
Digit 是一款2020年投放市场的人形机器人,它是 Agility 的第一个机器人 Cassie 的直系后代。
有着灵活的四肢和装有传感器的躯干,这将使其能够在复杂的环境中导航并执行包裹递送等任务。
Digit 的特定功能包括:
(1)上身带有集成感应,计算和两个4自由度臂。
(2)2自由度支脚可在各种表面上改善平衡性和稳定性。
(3)全天候户外操作的密封接头。
(4)经 UN 38.3 认证的电池,用于航空货运。
(5)全面的软件 API-用户可利用其控件和视觉算法来开发最终用户应用程序,可将 Digit 用作开发平台并编写的低级代码。
Digit 的手臂旨在帮助机器人的移动性和平衡,因为它们与步态协调摆动。
Digit 的手臂还可以让 Digit 在跌落时抓住自己,并重新调整身体以重新站起来。
Digit 的强度足以拾起和堆放重达 18 公斤(40 磅)的箱子。
Agility 的创始人相信,像 Digit 这样的机器人有朝一日会帮助照顾家里的人,协助应对灾难,并将包裹送到我们的前门。
基本参数:
HEIGHT:155 cm | 61 in (standing)
LENGTH:20 cm | 7.9 in
WEIGHT:42.2 kg | 93 lb






Cassie 第一代
机构:敏捷机器人公司(Agility Robotics.)类型:足式 » 双足非人形应用:工业机器人, 运输配送机器人, 运输配送机器人, 探险救灾机器人, 科研实验作品, 仿人机器人
Cassie 是一个动态的双足机器人,可以以类似于人类或动物的方式行走和奔跑。
它的特点是:
1、步伐稳健、精准,可适应各种路面,能用于科学研究,灾难救援,货物运输。
2、可以处理多样化和复杂的地形,非常适合搜索和救援或包裹递送。
3、坚固耐用,无需安全绳即可在户外进行实验。
4、非常节能,一次充电即可运行数小时。
Cassie 是敏捷机器人公司的第一款产品,在 2017 年至 2019 年间出售。
Cassie是根据ATRIAS的设计原则进行工程优化的结果。
基本参数:
HEIGHT:115 cm | 45.3 in
LENGTH:40 cm | 15.75 in
WIDTH:55 cm | 21.6 in
WEIGHT:31 kg | 12.2 lb
SPEED:5 km/h | 3.1 mph (Walking speed using prototype stepping control)
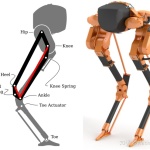
具体结构分析如下:

Cassie只有脚的驱动是连杆机构,我们所能看到的上端的连杆并不是驱动连杆。
整个Cassie腿部上半部分是一个六杆机构,如下图所示。当然,此处所谓的六连杆是将板簧的变形也等效为了一个转动关节。如果将弹簧考虑为刚体,则其腿部结构如图中红线所示。
由此可见,Cassie的上半部分连杆不是用来传递驱动力,那它的作用是什么呢?
根据Cassie设计的理念,为了减少对电机的冲击,Cassie的膝关节和踝关节(请注意这里所说的膝关节和踝关节并不是直观上对比人体结构的膝关节踝关节,具体情况图里标识)都安装有板簧。Hip和Heel间连杆的上端旋转中心是髋Pitch旋转方向的中心,当然此处可以自由旋转。当脚与地面产生冲击时,如果没有板簧连接在下肢,冲击力将通过腿部结构传给电机,必须控制电机产生相应的力去抵消冲击。当板簧连接下肢和电机中心后,该部分力将通过板簧、连杆(与电机中心轴连接)传到上部,弹簧不仅减震,而且将转移部分力由整个结构承担,而不仅仅依靠电机。膝关节弹簧类似。





Cassie最新版
机构:敏捷机器人公司(Agility Robotics.)类型:足式 » 双足人形应用:工业机器人, 运输配送机器人, 运输配送机器人, 探险救灾机器人, 科研实验作品, 仿人机器人, 仿人机器人
Cassie最新版 是由俄勒冈州立大学开发的, 它的特点是具有两只脚帮助它移动,不像其他锚定或使用轮子。
该机器人的“腿”中有一个结构模拟膝盖,以促进其所有运动。






DIGIT V1
机构:敏捷机器人公司(Agility Robotics.)类型:足式应用:工业机器人, 运输配送机器人, 运输配送机器人, 探险救灾机器人, 科研实验作品, 仿人机器人, 仿人机器人, 运输配送机器人, 仿人机器人
DIGIT V1是Agility Robotics研发的机器人。
这款机器人的大小和外观类似于一个个子较小的成年人,它可以借助激光雷达技术和其他传感器在环境中半自主移动,它的双臂能举起18公斤重的箱子。
该机器人可用于多项服务领域,包括物流、仓储和工业检测。









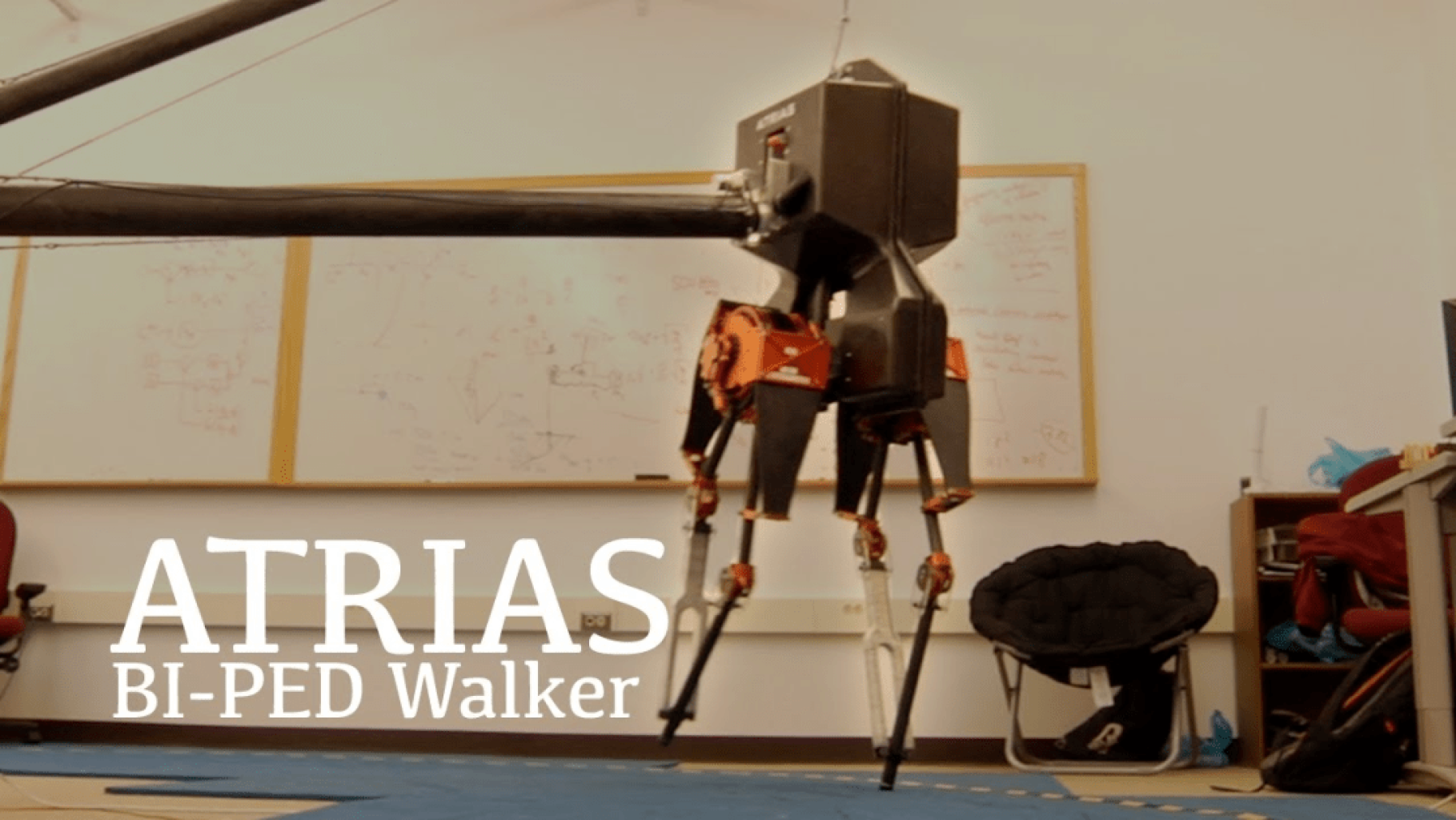
Atrias
机构:敏捷机器人公司(Agility Robotics.)类型:足式 » 四足应用:工业机器人, 运输配送机器人, 运输配送机器人, 探险救灾机器人, 科研实验作品, 仿人机器人, 仿人机器人, 运输配送机器人, 仿人机器人, 仿人机器人
Atrias是第一台展示人的步态动力学,并实现弹簧质量行走的机器人,其可再现人的行走的地面反作用力和质心运动。
Atrias的脚踝只有定点脚,没有驱动器,是一台欠驱动(underactuated)的机器人,这就意味着为了保持平衡,它必须一直「走」下去。
因此,Atrias虽然在离散行走上有出色的表现,但可能更适合存在于实验场景,而难以像 Atlas 那样走向现实世界。


Marlo
机构:敏捷机器人公司(Agility Robotics.)类型:足式 » 双足人形应用:工业机器人, 运输配送机器人, 运输配送机器人, 探险救灾机器人, 科研实验作品, 仿人机器人, 仿人机器人, 运输配送机器人, 仿人机器人, 仿人机器人, 仿人机器人
Marlo是密歇根大学成功研发的双足机器人,它能够在没有其他支持的情况下在复杂路面上正常行走,Marlo机器人具备“3D行走”功能,意味着能够以任意角度进行行走。
通过软硬件的配合,MARLO可以根据路面环境的不同进行自我调整,弯曲步态从而能够达到移动的目的。在未来Marlo上将会装备全面的3D控制器,能够在复杂地形中更好的调整步速。






相关文章
2023-12-30
tech church
2023-12-30
supply China
2023-12-30
dcvc
2023-12-30
TheRobotReport
2023-12-01
buiness insider
2023-10-25
Robots 24/7
2023-09-29
USA Today
2023-09-18
cnbc | lora kolodny
2023-09-18
hypebest
2023-03-20
business wire
2022-07-08
网络
相关视频
2023-12-30
tech church
2023-12-30
supply China
2023-12-30
dcvc
2023-12-30
TheRobotReport
2023-12-01
buiness insider
2023-10-25
Robots 24/7
2023-09-29
USA Today
2023-09-18
cnbc | lora kolodny
2023-09-18
hypebest
2023-03-20
business wire
2022-07-08
网络