开发者介绍
B站机器人极客博主,现居北京,目前从事计算机软件行业
北京理工大学 控制科学与工程博士
舵狗之家:QQ群567423074

幽灵蛛
机构:华北舵狗王类型:足式 » 四足应用:开源机器人
开源者介绍:
B站up主 华北舵狗王
学校:北京理工大学
控制科学与工程博士
舵狗之家:QQ群567423074
产品介绍:
8自由度并联的开源足式机器人
优点:侧向稳定性高,不容易摔倒,结构对称简单
缺点:摆动运动空间不足,足端力关节部分存在耦合,横滚控制耦合欠驱动


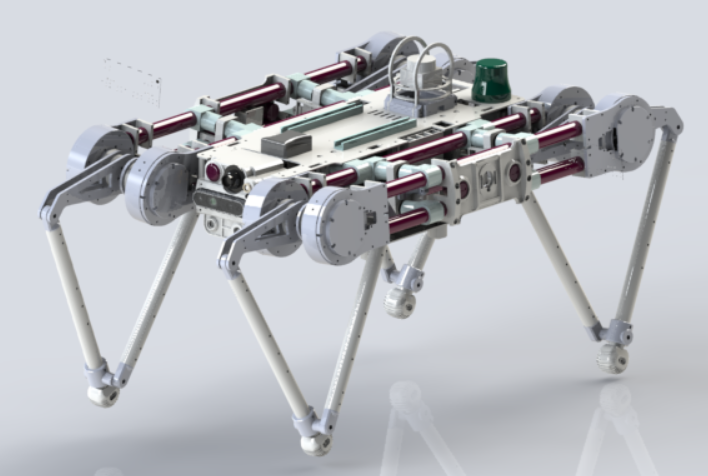
Vision40
机构:华北舵狗王类型:足式 » 四足应用:开源机器人, 开源机器人
开源者介绍:
B站up主 华北舵狗王
学校:北京理工大学
控制科学与工程博士
舵狗之家:QQ群567423074
产品介绍:
12自由度仿狗机器人
优点:运动速度快,身体细长
缺点:后腿与环境容易干涉,重心后移,非关节直驱下Pit轴转动惯量大

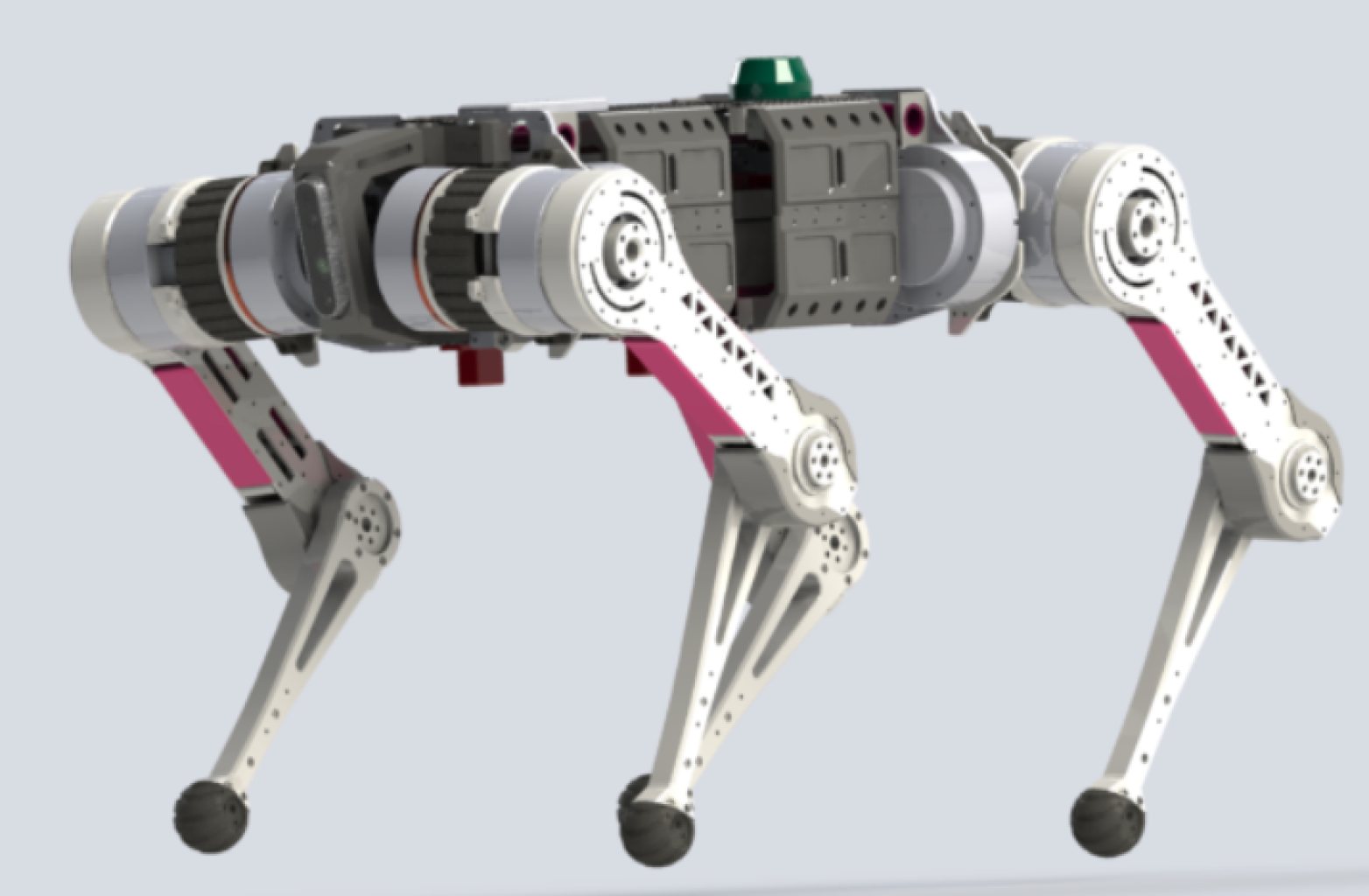
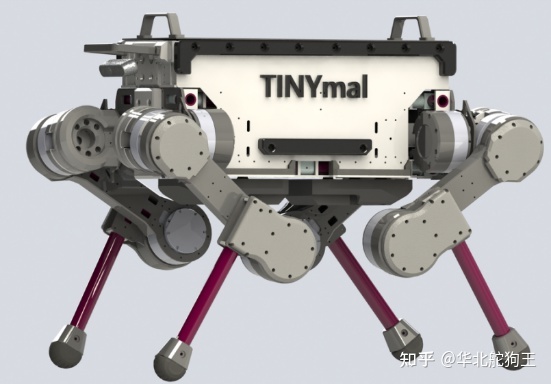
Tinymal-CI
机构:华北舵狗王类型:足式 » 四足应用:开源机器人, 开源机器人, 开源机器人
开源者介绍:
B站up主 华北舵狗王
学校:北京理工大学
控制科学与工程博士
舵狗之家:QQ群567423074
产品介绍:
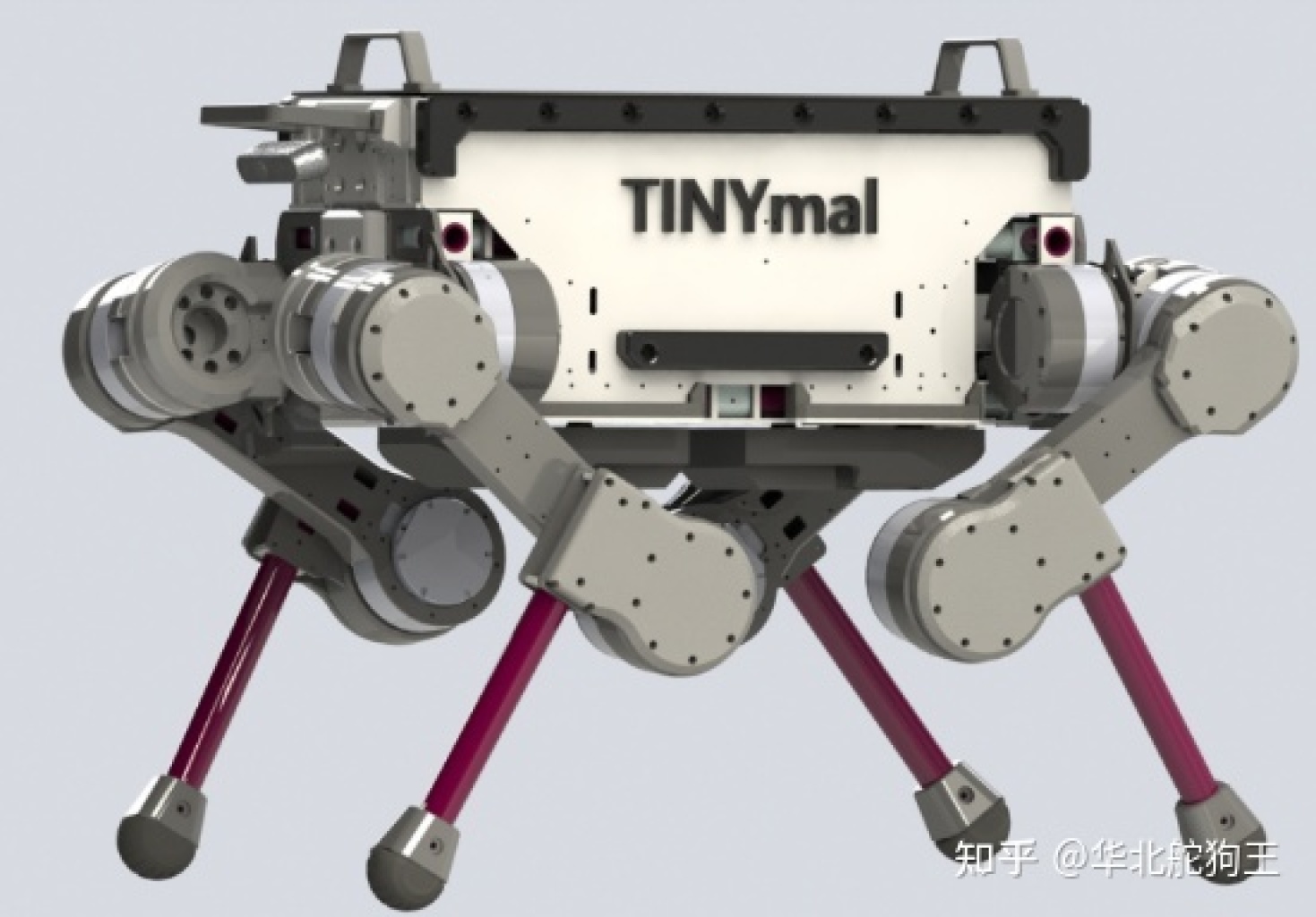
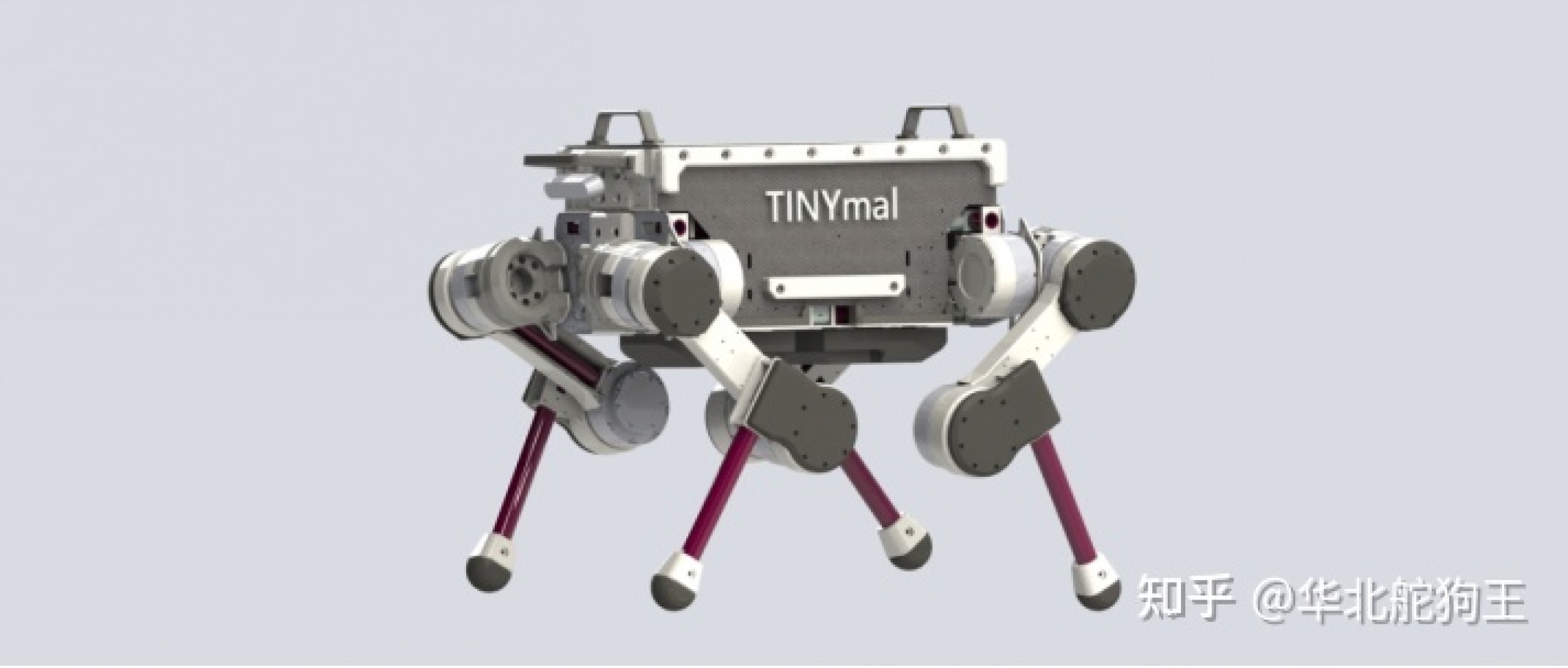
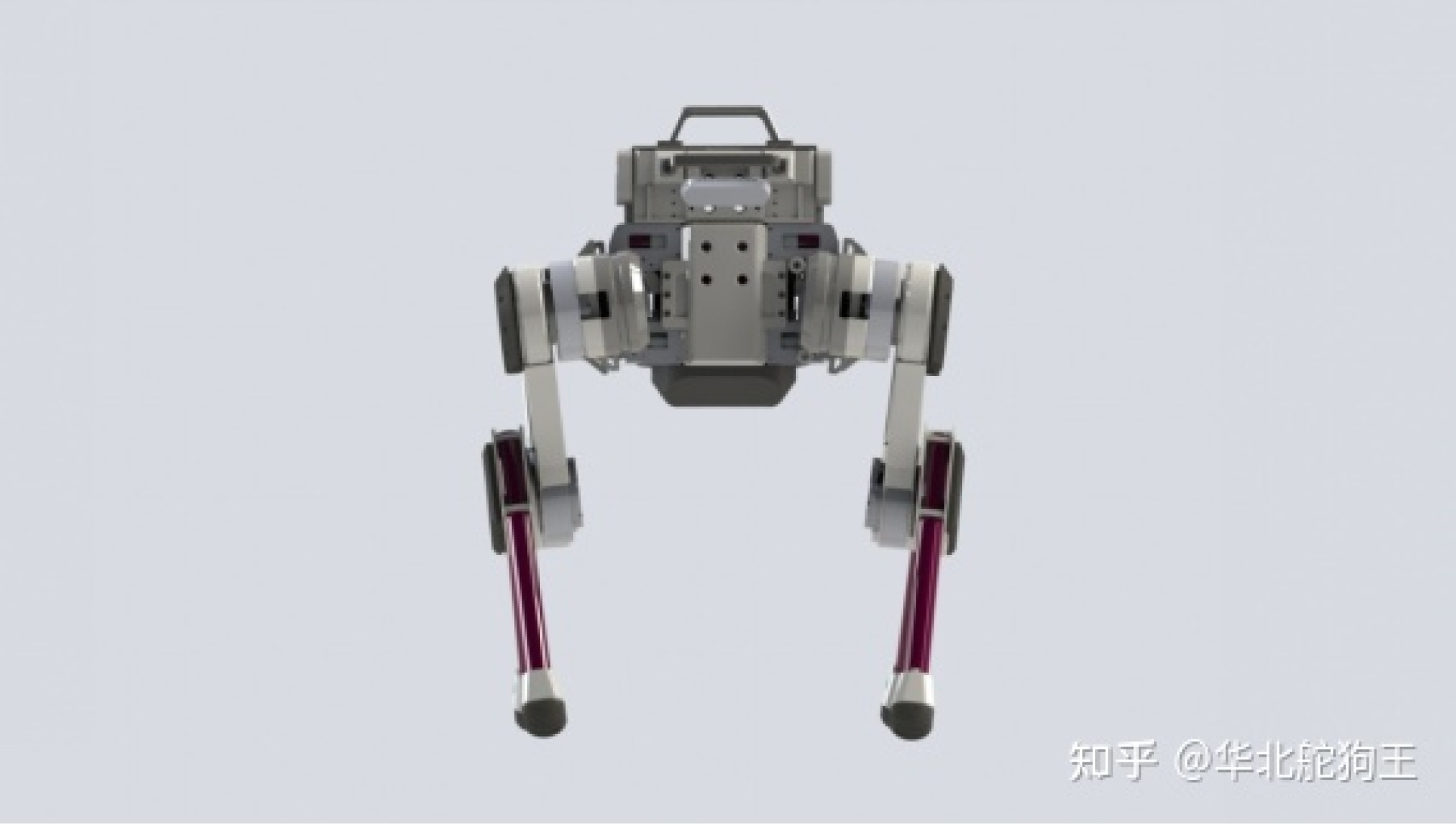
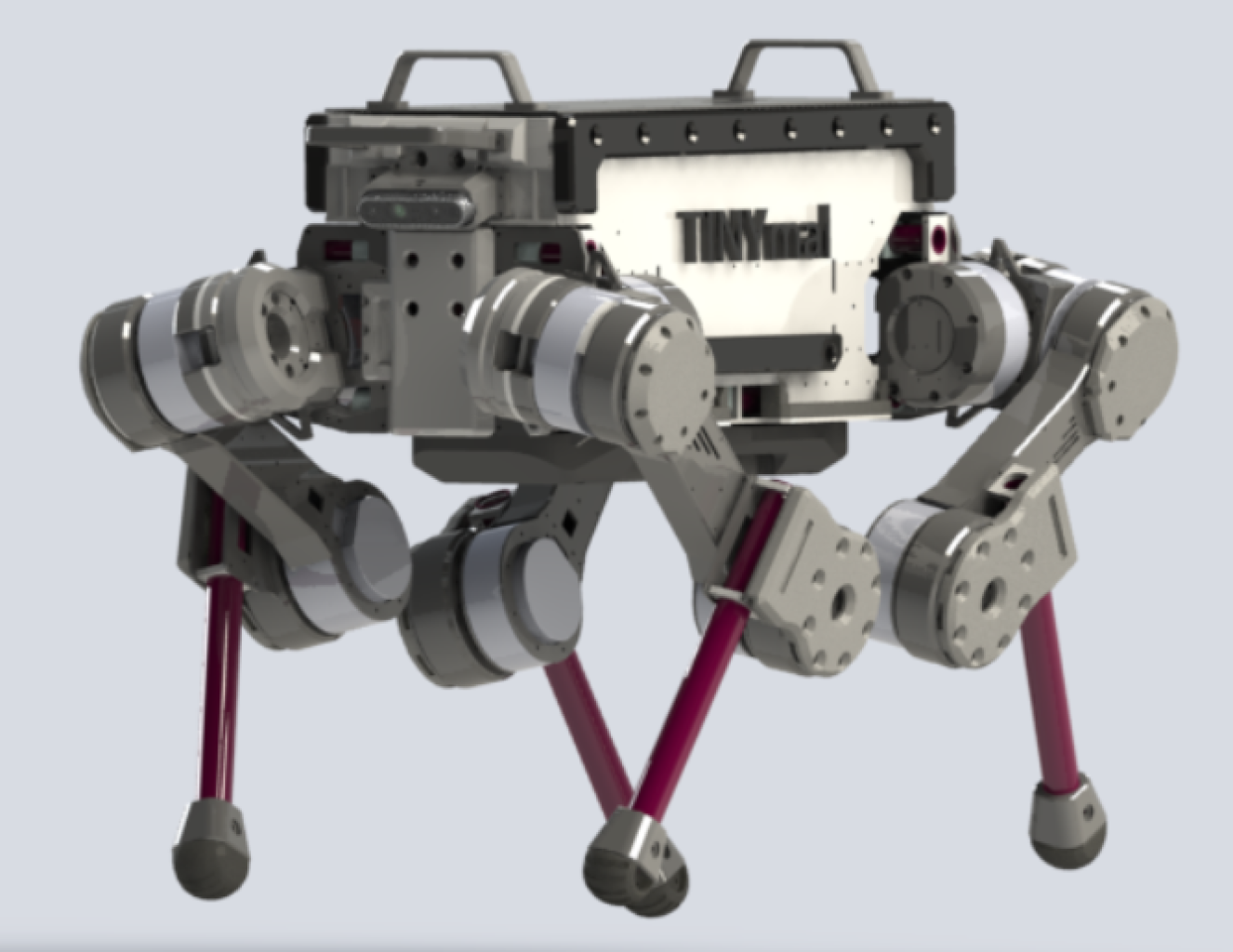
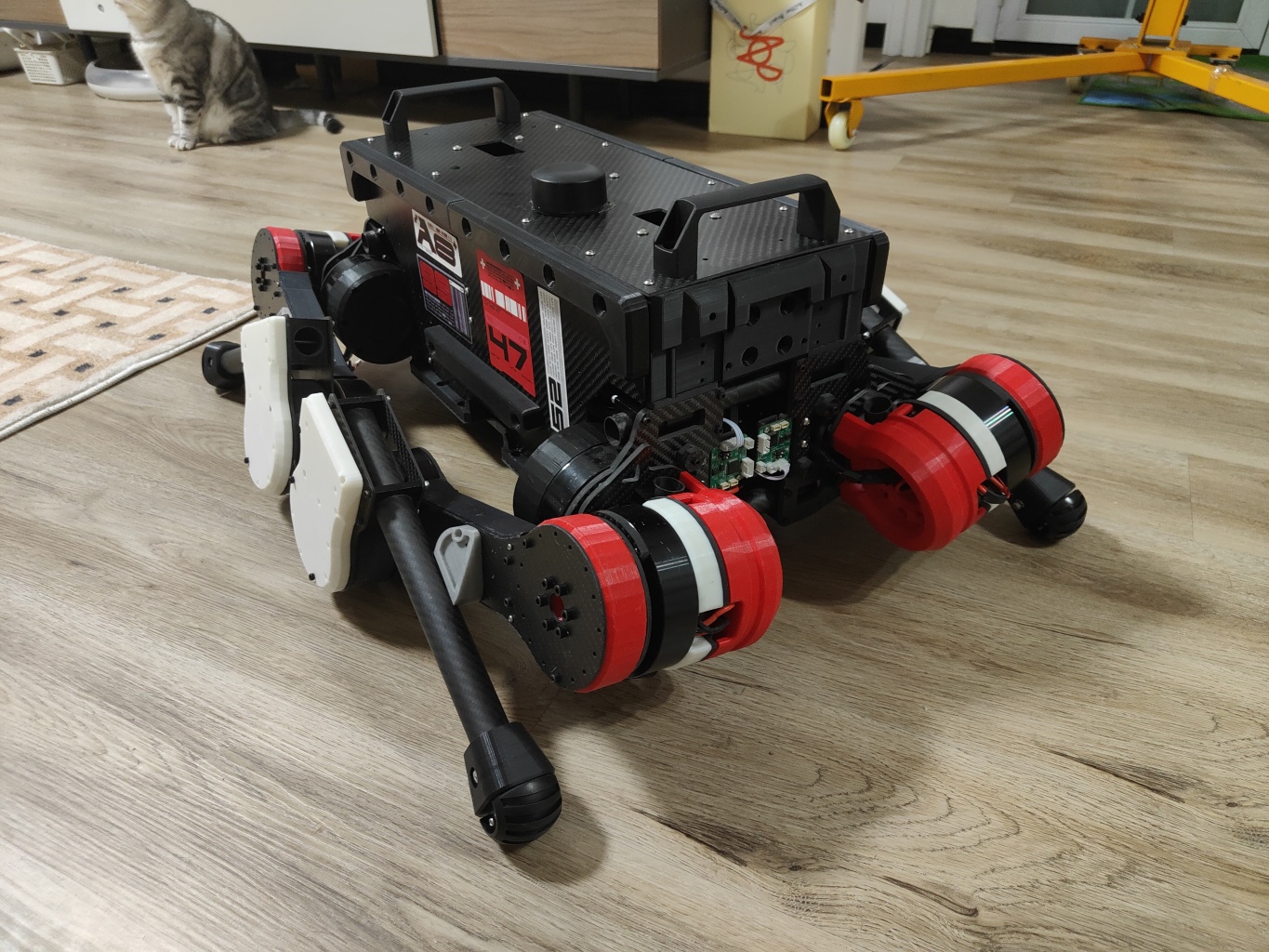
Tinymal-C1完美地缩比了Anymal-C的机械结构特点,着重保留了其膝关节电机直驱的特色,以及其整体壮硕,机甲防护的特色,Tinymal-C1为1:5速比模型整机重量大,尺寸大,对Anymal-C整体造型又进一步进行优化设计提升美观与安装维修便利性。内肘12自由度,可以满足各类DIY需求。
优点:对称性好,关节直驱结构简单,Pit轴惯量集中
缺点:关节摆动惯量大,运动速度慢

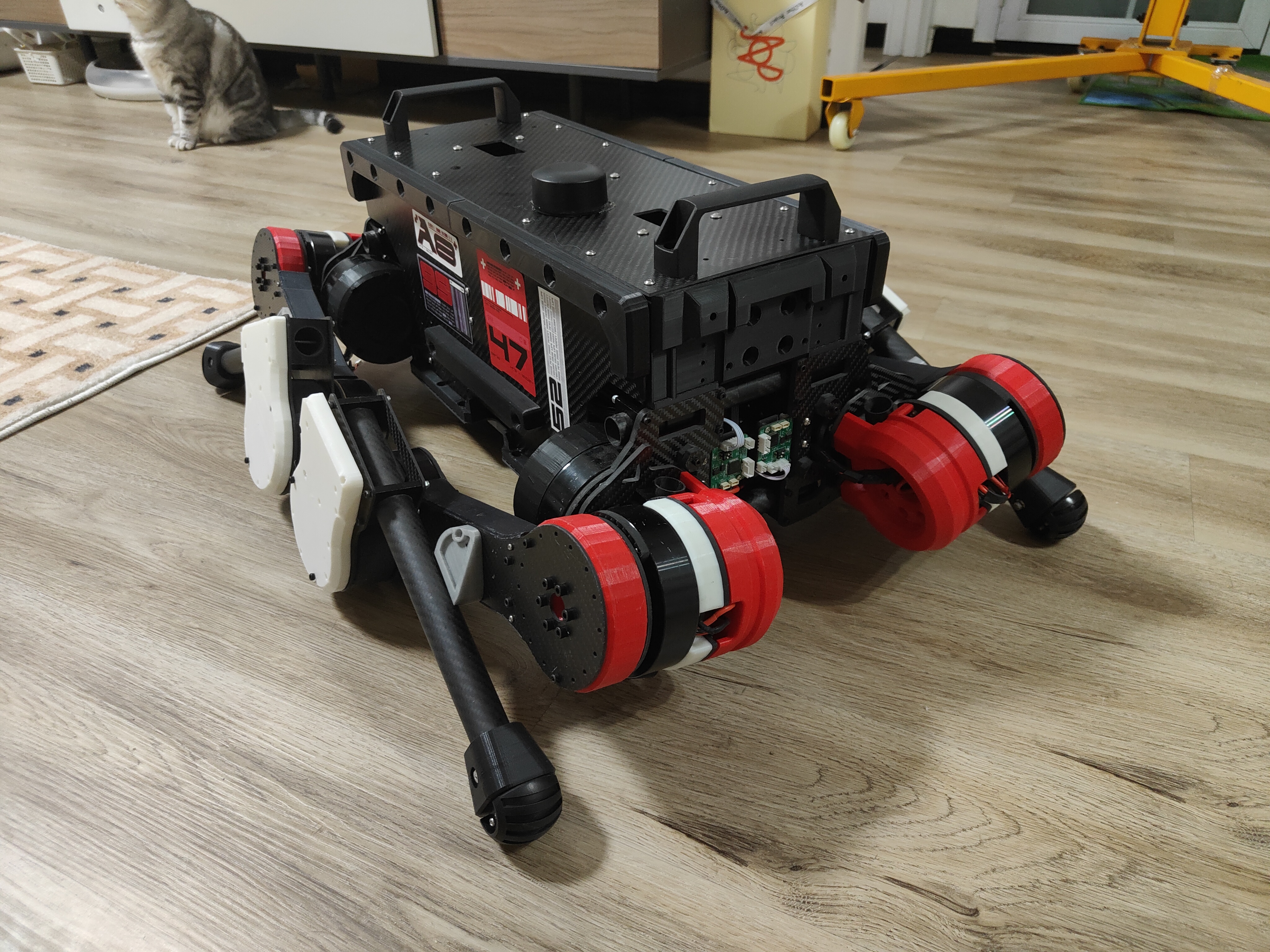
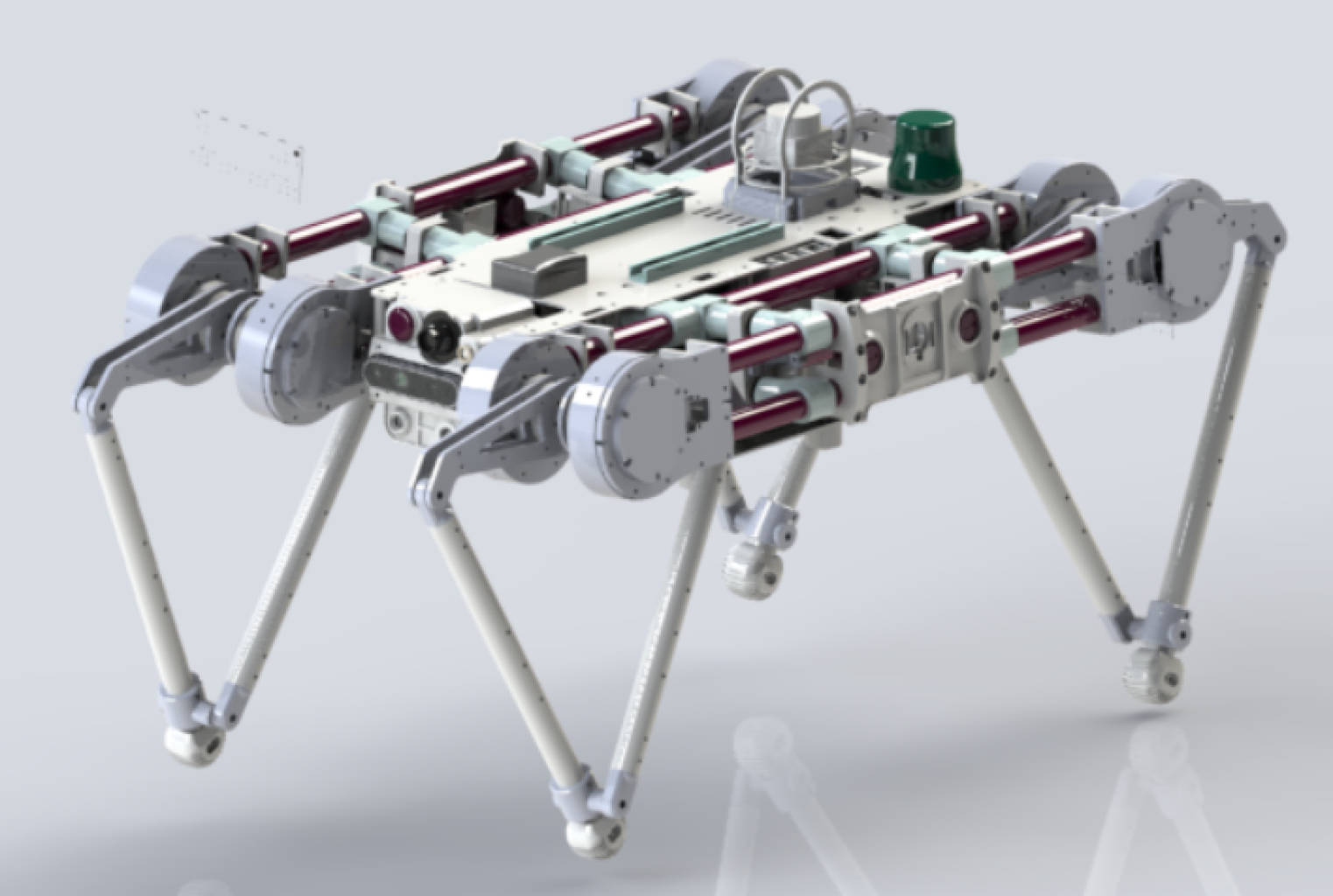
Tinymal-B
机构:华北舵狗王类型:足式 » 四足应用:开源机器人, 开源机器人, 开源机器人, 开源机器人
开源者介绍:
B站up主 华北舵狗王
学校:北京理工大学
控制科学与工程博士
舵狗之家:QQ群567423074
产品介绍:
Tinymal是世界上首个高保真1:5可动缩比模型,在全手工定制的机械工业造型结构基础上,融合了先进的运动控制算法,让其在如此小的缩比模型中仍然能够实现Anymal的力柔顺行走,障碍物跨越,高保真地模拟出Anymal在站立、Trot和Walk下的步态行为。






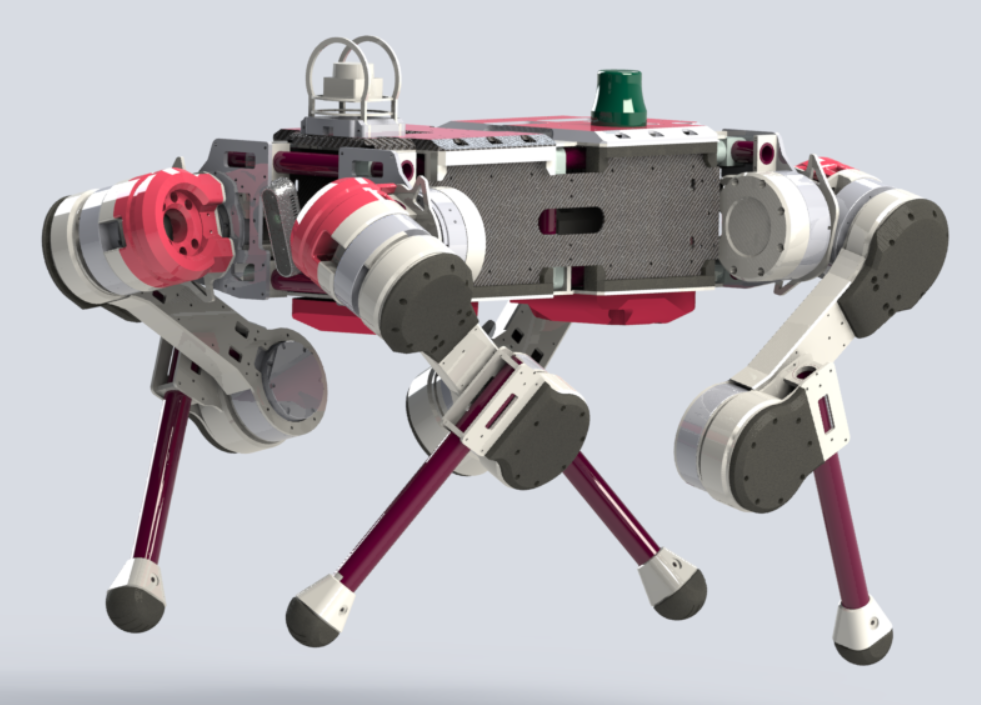
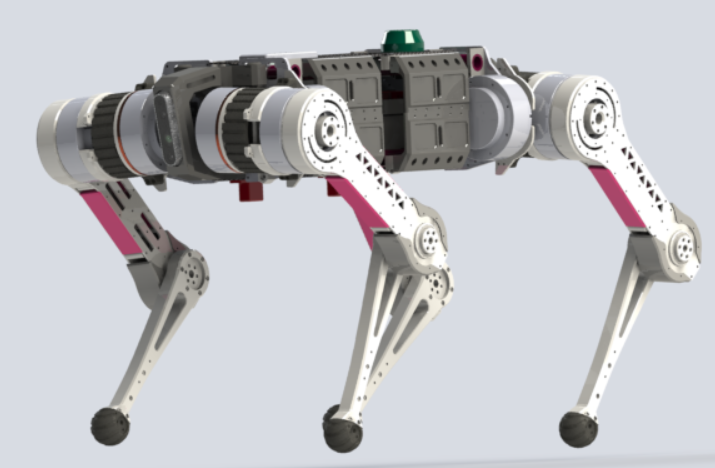
tinymal spirit
机构:华北舵狗王类型:足式 » 四足应用:开源机器人, 开源机器人, 开源机器人, 开源机器人, 开源机器人
开源者介绍:
B站up主 华北舵狗王
学校:北京理工大学
控制科学与工程博士
舵狗之家:QQ群567423074
产品介绍:
tinymal spirit保留Spirit40主要特征进行重新的设计,基于3D打印与碳纤维切割完成组装与加工