本公司法人或CEO可进行认证领取
实验室介绍
意大利理工学院(IIT)是受《民法典》第14条及其后各条管辖的基金会,由国家资助,用于开展具有普遍意义的科学研究活动,用于技术发展。
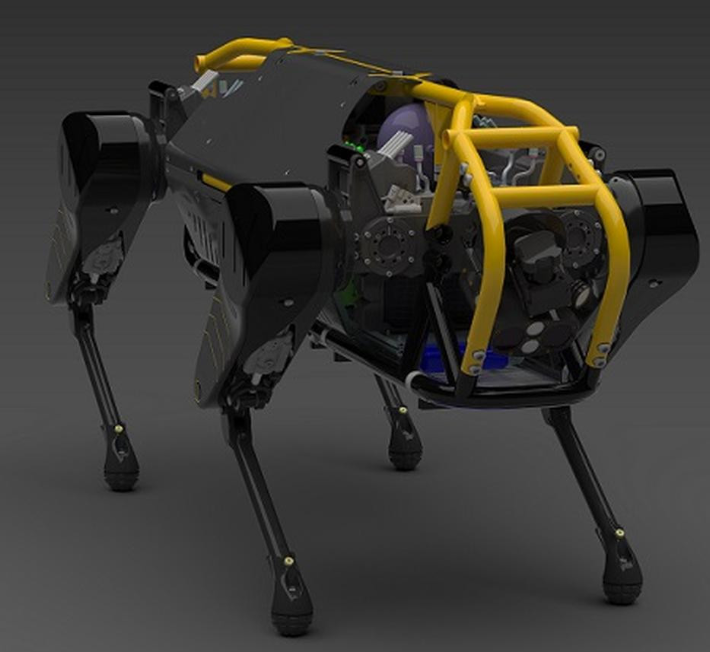



HyQReal 机器狗
机构:意大利理工学院 Istituto Italiano di Tecnologia(IIT)类型:足式 » 四足应用:安保巡逻机器人, 勘探巡逻机器人, 探险救灾机器人, 军事辅助机器人
HyQReal 长1.33米,高90厘米,加上液压和电池,其重量为130千克。
该机器人由铝制防滚架和由 Kevlar、玻璃纤维和塑料制成的表皮保护。
这款机器人还有专门定制的橡胶脚,可以在遇到困难时提供牵引力,能够在以斜坡,楼梯或碎屑为特征的困难地形中导航,其机动性远远大于轮式或履带式车辆。
2019年,这款机器人证明能够产生足够的力量来拖曳超过3吨的客机。
该机器人上有两台计算机,一台用于视觉,另一台用于控制。配备了各种摄像头和多模态传感器,用于实时环境感知。

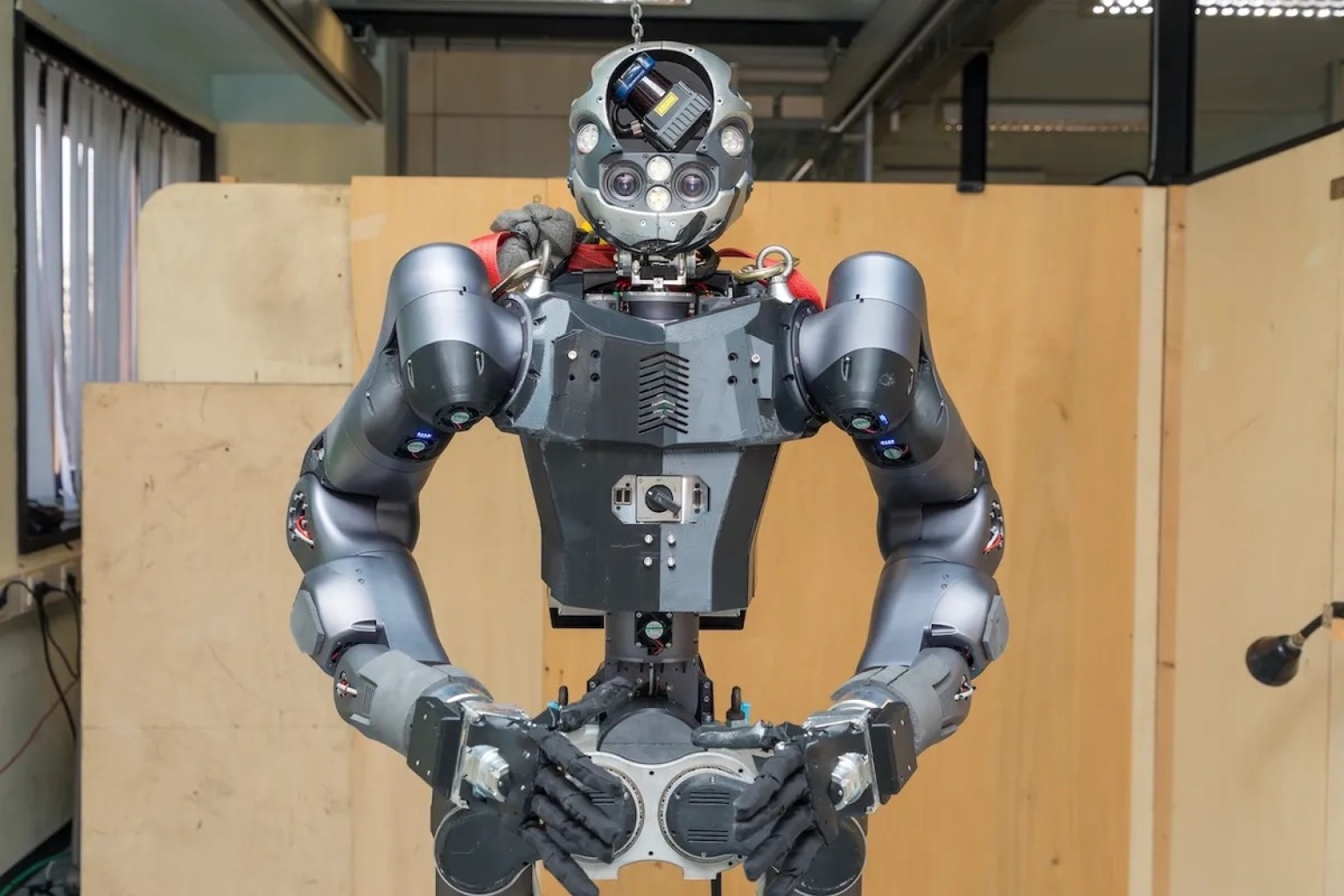
WALKMAN
机构:意大利理工学院 Istituto Italiano di Tecnologia(IIT)类型:足式 » 双足人形应用:安保巡逻机器人, 勘探巡逻机器人, 探险救灾机器人, 军事辅助机器人, 探险救灾机器人 由铝、镁合金和钛制成的框架。这些轻质材料使WALK-MAN的重量减轻了31公斤,从133公斤降至102公斤。尽管变得轻量化,但机器人的手臂强度仍提高了40%,每个有效载荷容量为10kg。
由于需要搬运的重量更少,尤其是上半身的重量,机器人现在更快、更有活力,并且能够更好地平衡自身,所有这些对于在它打算前往的各种灾区移动都非常重要。上半身执行器也是新的,即使使用更小的电池,提高效率意味着WALK-MAN可以使用1kWh电池运行约2小时。
iCub 3 人形机器人
机构:意大利理工学院 Istituto Italiano di Tecnologia(IIT)类型:足式 » 双足人形应用:安保巡逻机器人, 勘探巡逻机器人, 探险救灾机器人, 军事辅助机器人, 探险救灾机器人, 个人服务机器人, 陪伴机器人, 仿人机器人 iCub 3头部内置了可当做“眼睛”的立体旋转摄像头、当做耳朵的双麦克风、以及可反映嘴部与眉毛动作的LED线条,此外每个指尖还有触觉传感器。
iCub 3 具有 53 个驱动自由度,每条手臂配备了 7 个电机、每只手 9 个、头部 6 个、躯干(腰)3 个、以及每条腿 6 个。电池安装位置从背部转移到了躯干部位,且iCub的两条腿能够跟快地行走,平衡与运动性能也更接近于真人。
由 IIT 研究人员设计的高级软件架构控制和管理 iCub3 机器人和 iFeel 系统之间的互连。此外,该软件基础架构允许集成商业可穿戴技术,从而完善了 iCub3 虚拟形象系统。例如,远程用户在允许他自由移动上身的虚拟现实平台内原地行走。
iCub3 机器人比以前的 iCub 版本高 25 厘米,因此测量为 1.25 米,代表了一个更适合在人类环境中进行交互的平台。它的平衡和运动更加稳健,能够更好地模拟人类运动和身体互动。因此,机器人更大——重 52 公斤对 33 公斤——并且它的腿上有更强大的电机,从而获得更快的运动。此外,iCub3 机器人与之前的平台的不同之处还在于不同的驱动机制,不再基于电缆驱动的关节。在传感器方面,它有一个额外的深度摄像头和最新一代的力感应,可承受更高的机器人重量。最后,iCub3 具有更高容量的电池,它位于躯干组件内,而不是包含在刚性连接的背包中。
在通过操作系统从热那亚到威尼斯来回实现的演示中,IIT 可穿戴 iFeel 套件跟踪操作员的身体动作,化身系统将它们传输到威尼斯的 iCub3,然后像用户在热那亚一样移动。还向用户提供了跟踪用户表情、眼睑和眼球运动的耳机。这些头部特征被投射到化身上,以高保真度再现它们:化身和人类具有非常相似的面部表情。用户戴着感应手套,可以跟踪他的手部动作,同时提供触觉反馈。
借助头像系统,远程用户可以与威尼斯的导游微笑、交谈和握手:他的头像相应地微笑、交谈和握手。类似地,当导游在威尼斯拥抱虚拟形象时,热那亚的操作员也能感受到拥抱,这要归功于 IIT 的 iFeel 套装,该套装还提供上身触觉。此外,热那亚的远程用户和威尼斯的导游之间的对话是可能的,这要归功于记录和传输操作员语音的系统,以便化身可以在威尼斯重现它。传输通过标准光纤互联网连接进行流式传输,仅产生几毫秒的延迟。








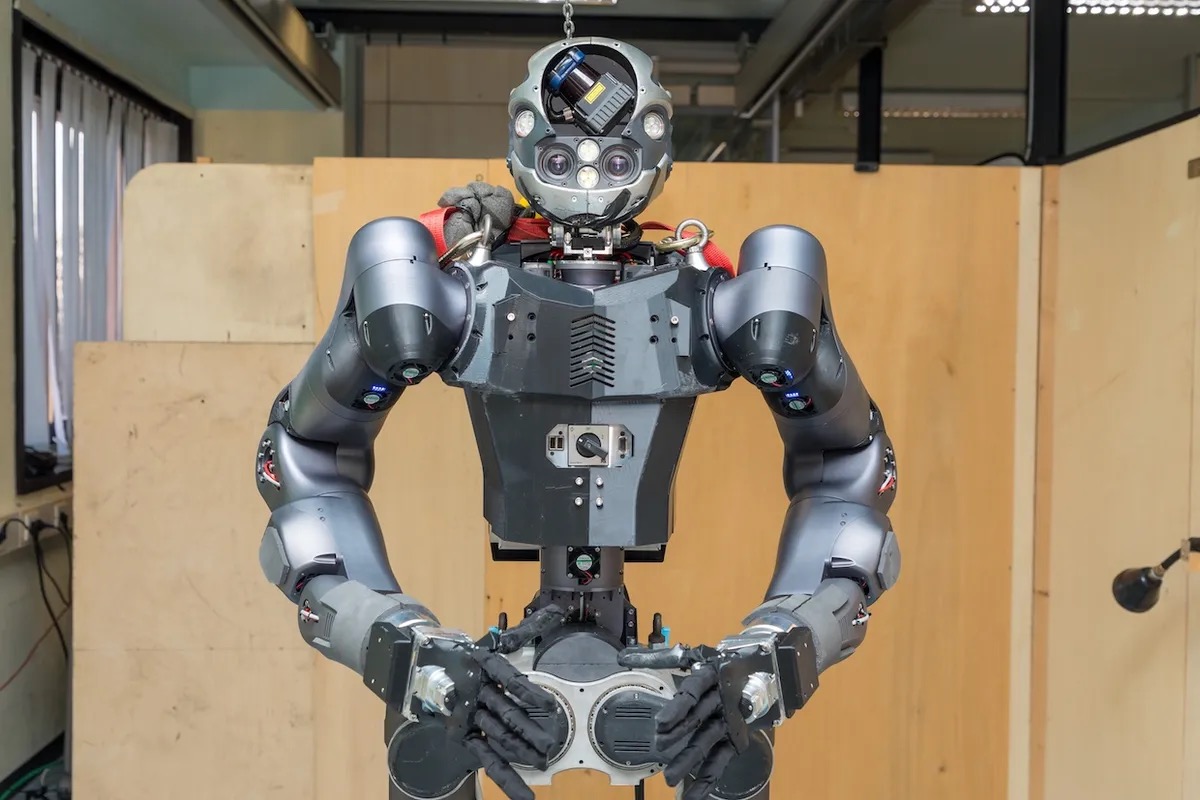
Centauro
机构:意大利理工学院 Istituto Italiano di Tecnologia(IIT)类型:足式 » 四足应用:安保巡逻机器人, 勘探巡逻机器人, 探险救灾机器人, 军事辅助机器人, 探险救灾机器人, 个人服务机器人, 陪伴机器人, 仿人机器人, 科研实验作品 Centauro机器人采用了轮、腿混合动力驱动。Centauro高 1.5(5 英尺)、重 93 公斤。
从外观上看,拥有和其他IIT类机器人,如WALK-MAN相似的坚固性能。因此,它是一个既能作为研究工具,又能在现实世界中发挥作用的机器人。
外壳由轻金属及3D打印塑料制成,机身内配有同时处理多种需求的三台计算机。Centauro 支持远程遥控和半自治,在通信中断或延迟的情况下,机载电脑可以自行预测该如何移动。
Centauro的腿有6个自由度,可以通过旋转和伸展臀部、膝盖和脚踝来实现关节的运动,Centauro还可以采用不同的配置,比如四足机器人的典型的腿部配置,包括内、外膝关节,以及蜘蛛腿的配置,更有利于机器人操纵大型工具。底部的轮子由铝合金制成,允许机器人发挥基于轮子的移动性,其外层用弹性体材料进行过模,保证了粘阻尼接触,同时在地面上滚动时产生适当的摩擦。
轻型双臂可以举起大约 11 公斤(24 磅)的重物,与成年人的操控强度和灵活性相当,还可以表演“空手道劈木板”。
“半人马”这种设计优化了稳定性和移动性,并允许远程操作人员更直观有效地控制机器人的臂膀和手。

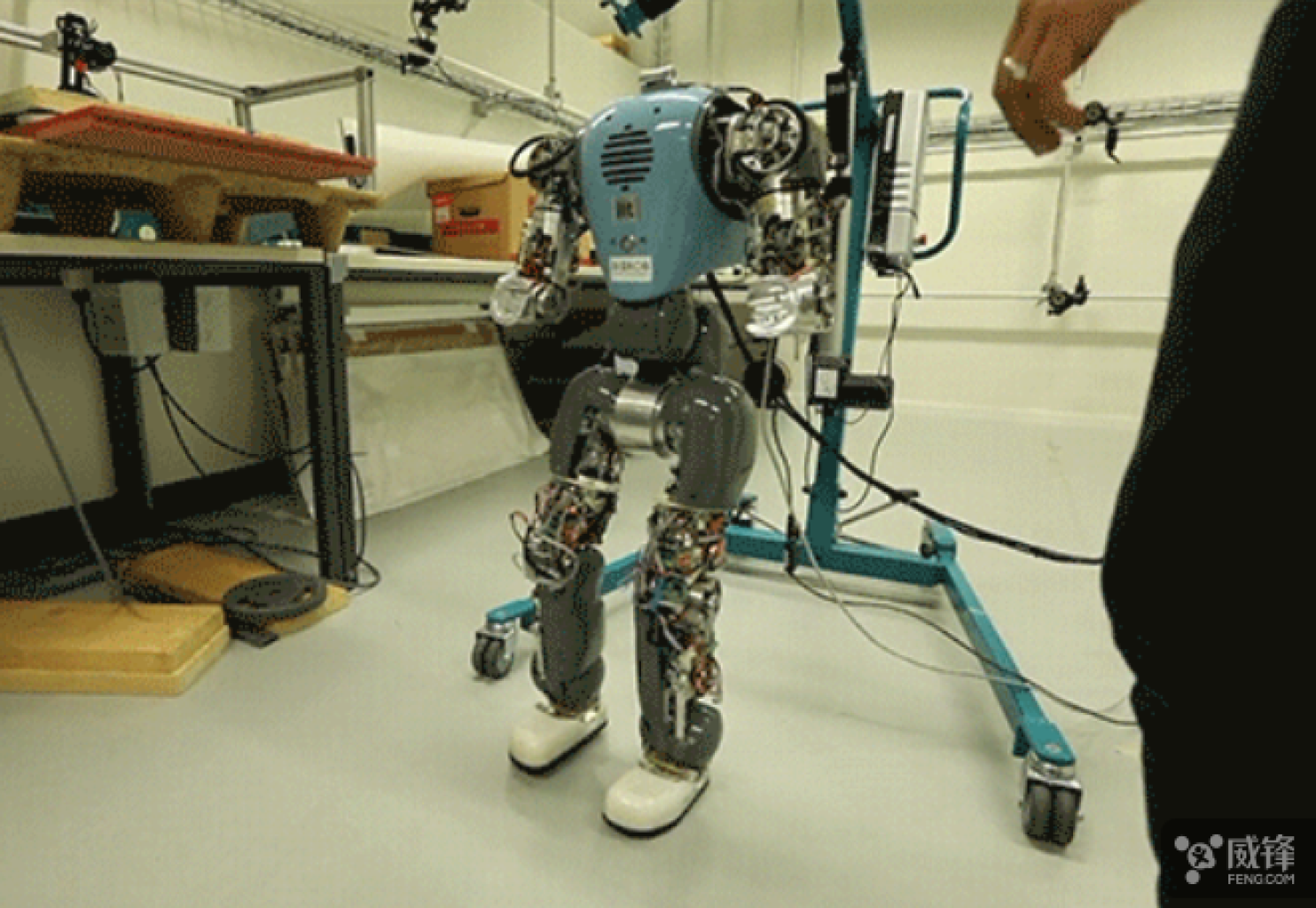
Coman
机构:意大利理工学院 Istituto Italiano di Tecnologia(IIT)类型:足式 » 双足人形应用:安保巡逻机器人, 勘探巡逻机器人, 探险救灾机器人, 军事辅助机器人, 探险救灾机器人, 个人服务机器人, 陪伴机器人, 仿人机器人, 科研实验作品, 仿人机器人
仿照四岁孩子而造的COMAN,身高94.5厘米(从脖子到脚),体重31.2千克。
该25自由度(DOF)机器人结合了刚柔两种关节,柔性关节(14 DOF)依靠的是串联柔性制动器。这些由IIT团队定制的制动器被应用于弯曲或伸展的机械臂和机械腿上。
这些制动器既小巧又模块化,该特点使之成为打造如人形机器人等多自由度机器人的理想材料。
研究者们也为每个弹性关节开发了定制的力矩传感器,包括用于踝关节的一个六维力/力矩传感器。