
实验室介绍
早稻田大学(Waseda University),简称早大,是世界著名综合研究型学府。
1882年,伴随“学问要独立”的宣言,由日本前首相大隈重信创立。
早稻田大学是日本超级国际化大学计划TOP顶尖校,卓越研究生院计划、领先研究生院计划高校,日瑞Mirai项目、学术研究恳谈会、环太平洋大学联盟、全球大学高研院联盟、Universitas 21、亚太国际教育协会、东京六大学联盟等项目和组织成员。

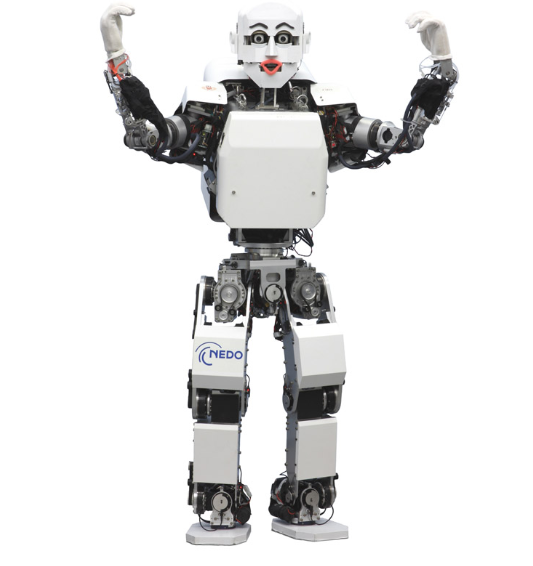

WABIAN-2R
机构:早稻田大学(Waseda University)类型:足式 » 双足人形应用:科研实验作品
WABIAN-2R 的设计高度为1500mm,重量为64kg。
为了模仿人类的运动,这款机器人有41个 DOF 和关节的可移动范围,安装在后备箱上的计算机控制 WABIAN-2R 的运动。
它由一个 PCI CPU 板和 PCI I/O 板组成。作为I/O板,安装了HRP接口板(16通道D/As、16通道计数器、16通道PIO)和6轴力/扭矩传感器接收器板。
它的操作系统是 QNX Neutrino 版本 6.3。驱动系统由一个直流伺服电机和一个连接到电机轴的增量编码器和一个用于检测底座角度的光电传感器组成。
此外,每个脚踝都有一个6轴力/扭矩传感器,用于测量地面反作用力(GRF)和零力矩点(ZMP)。
WABIAN-2R 机器人最快的步行速度是1.8km/h。 它的脚分为前后脚掌,脚部不是一体的,前后脚掌之间增加了一个被动的关节,这样的设计可以实现节能64%。






KOBIAN-RIV
机构:早稻田大学(Waseda University)类型:足式 » 双足人形应用:科研实验作品, 个人服务机器人, 陪伴机器人, 医疗康复机器人 Kobian是一个喜欢做鬼脸的人形机器人。 它被设计用来研究人机互动,它用自己的身体和面部来表现不同的情绪,包括高兴、愤怒、恐惧和惊讶。 KOBIAN 能够展示7种不同表情,它能够更好地和人类交流,进而协助人类完成各项日常工作。它采用了双关节颈部设计,有助于它实现更加生动的表情和动作。它今后可能用于护理领域。

WATHLETE-1
机构:早稻田大学(Waseda University)类型:足式 » 双足人形应用:科研实验作品, 个人服务机器人, 陪伴机器人, 医疗康复机器人, 科研实验作品 专注于骨盆运动的双脚机器人WATHLETE-1在全身有22个有源自由度,膝关节和踝关节有板簧,膝关节除了改变板簧的有效长度和改变关节角度的有源自由度外,还具有调节关节柔软度的有源自由度。

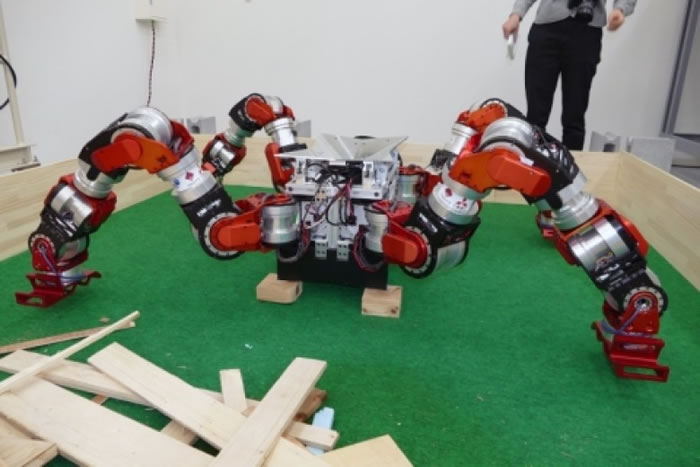
WAREC-1
机构:早稻田大学(Waseda University)类型:足式 » 四足应用:科研实验作品, 个人服务机器人, 陪伴机器人, 医疗康复机器人, 科研实验作品, 探险救灾机器人 WAREC-1机器人可在废墟上前进,也能进行高空工作,有助于灾后救援。
早稻田大学于向传媒展示WAREC-1机器人,它重155公斤,最高可伸展至1.69米,4只脚共有28个关节部分,每个肢体有7个自由度,能够活动自如,更可爬楼梯和在高空工作,有望在发生灾难时,用于常人难以涉足的灾区调查。

相关文章
2022-07-19
人工智能
相关视频
2022-07-19
人工智能