
企业介绍
成立于1992年的波士顿动力是四足机器人行业的排头兵。波士顿动力的创始人Marc Raibert(马克·雷伯特)被业内称为“机器狗之父”。
1992年成立后,波士顿动力主要在美国国防高级研究计划局(DARPA)的资助下,为美国军方提供机器人的研究和制造。
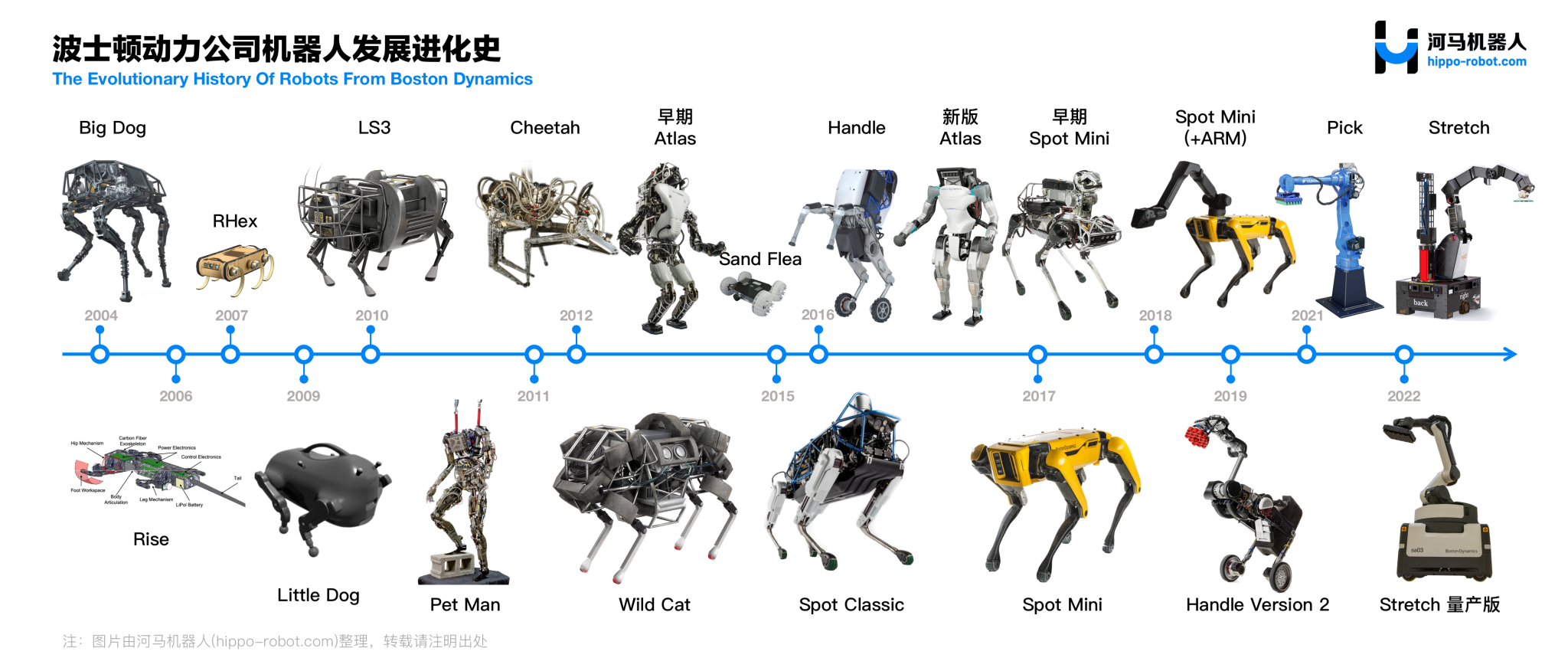
2005年,该公司的四足机器人“Big Dog”面世,让波士顿动力在业内一炮而红。研发Big Dog的初衷,是希望它能够像骡子一样,能够在士兵、车辆无法通过的地形中使用。因此,Big Dog的稳定性十分强,能够在复杂的地形中行走,还拥有空翻等技能。但由于运行噪音过大、体积过大等问题,最终没有被美国军方投入使用,但Big Dog在四足机器人的近现代发展史上,仍具有重要的里程碑意义。
随后几年,波士顿动力对四足机器人不断改进,相继推出Alpha Dog、LS3、Spot、SpotMini等产品,负载能力、移动速度和实用性不断提升,逐渐成为业内的佼佼者。
波士顿动力前后经历了三次易主:
2013年,Google斥30万美元巨资将波士顿动力收入囊中。
2017年6月,波士顿动力被Google卖给软银。
2020年12月又被软银以9.21亿美元出售给现代汽车公司。
旗下产品














Atlas
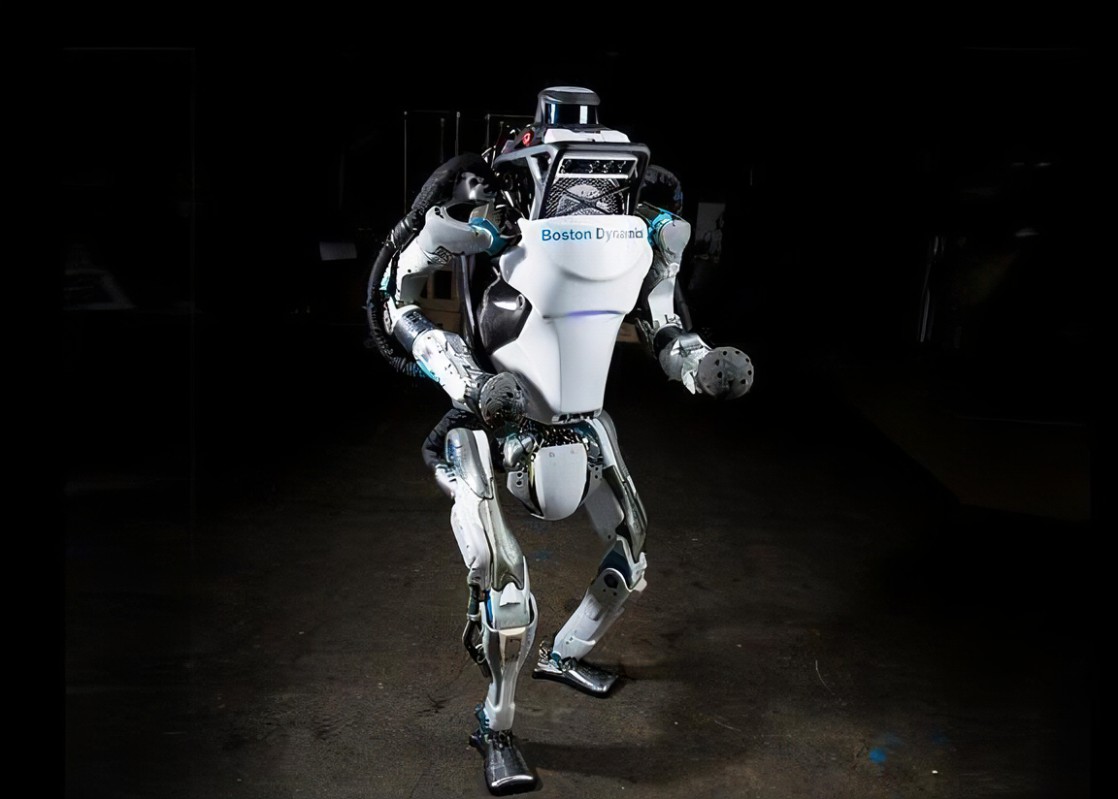
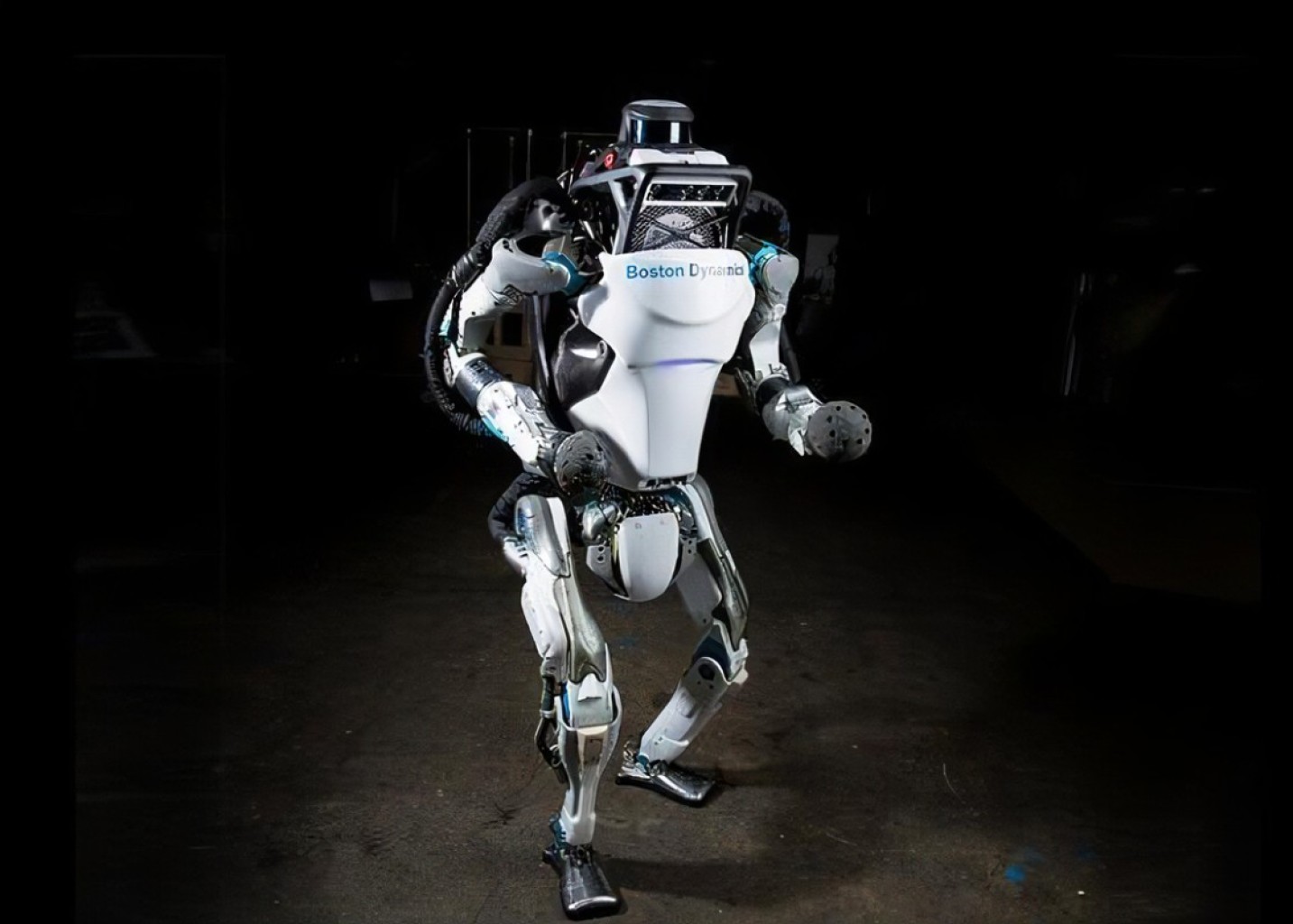
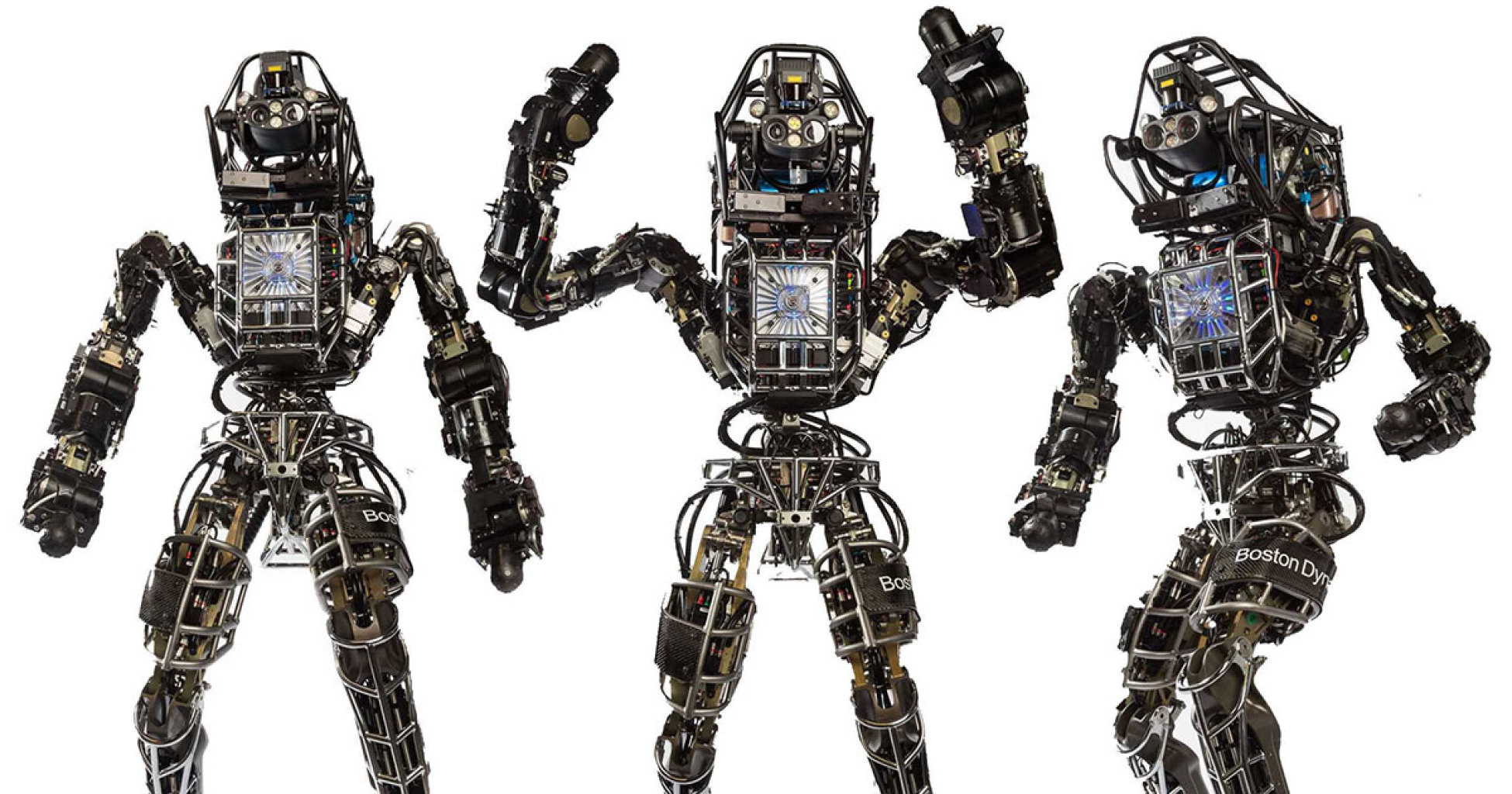
机构:波士顿动力(Boston Dynamics)类型:足式 » 双足人形应用:科研实验作品, 仿人机器人 Altas机器人是波斯顿动力的爆款之作,2016年首次亮相以来,一直备受关注。尤其是2020年底发布的Altas跑酷视频和舞蹈视频,其灵活度让人震惊不已,再次将Altas的热度推向了新的高度。该款机器人粉丝无数,一直素有机器人界“跑酷王”之称。
Altas全身的28个自由度均由液压驱动实现(立体视觉摄像头等的运动不计在内),具体表现在:
1. 单腿3个自由度:小腿纵向自由度,大腿纵向自由度,胯部横向自由度
2. 单脚踝2个自由度:横向和纵向自由度。通过双液压缸的联合驱动能够实现纵向、横向、斜向三种运动状态,这三种运动状态可增强行走过程中单腿支撑时腿部的运动能力。
3. 腰腹2个自由度:轴向和径向自由度
4. 单臂6个自由度:肩部轴向和径向自由度,大臂轴向和径向自由度,小臂轴向和径向自由度
-
腕部和机械手:各1个自由度
注:足部踝关节由两个直线执行器并联驱动,髋关节和手臂多是伺服摆动缸
跑酷认知能力:机器人感知算法的目的是将相机和雷达等传感器中的数据转换为对决策制定和规划形体动作有益的东西。虽然 Atlas 使用集成 IMU、联合位置和力传感器来控制自身的肢体动作,并通过感知地面来保持平衡,但它需要利用感知来识别和导航以间隙和窄梁等障碍。
Atlas 使用 TOF 深度相机以每秒 15 帧的速度生成环境的点云,点云是测距的大规模集合。Atlas 的感知软件使用一种名为多平面分割的算法从点云中提取平面。多平面分割算法的输入馈入到一个映射系统中,该系统为 Atlas 通过相机看到的各种不同对象构建模型。
Atlas 控制器被称为模型预测控制器(model-predictive controller, MPC),该控制器使用机器人动力学模型来预测机器人未来的动作。控制器的工作原理是通过优化来计算机器人当前要做的最优事情,从而随着时间的推移产生最佳动作。






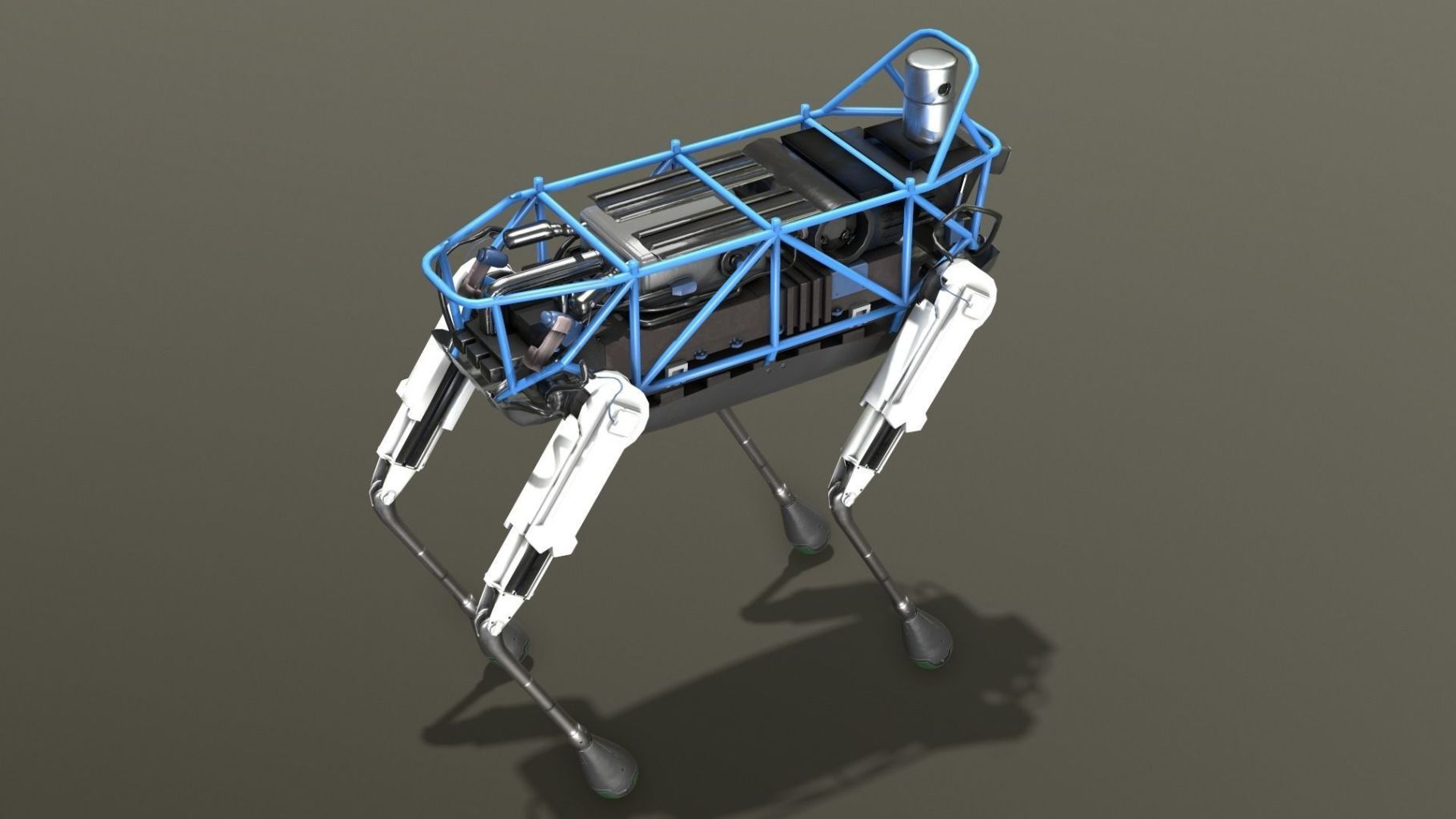
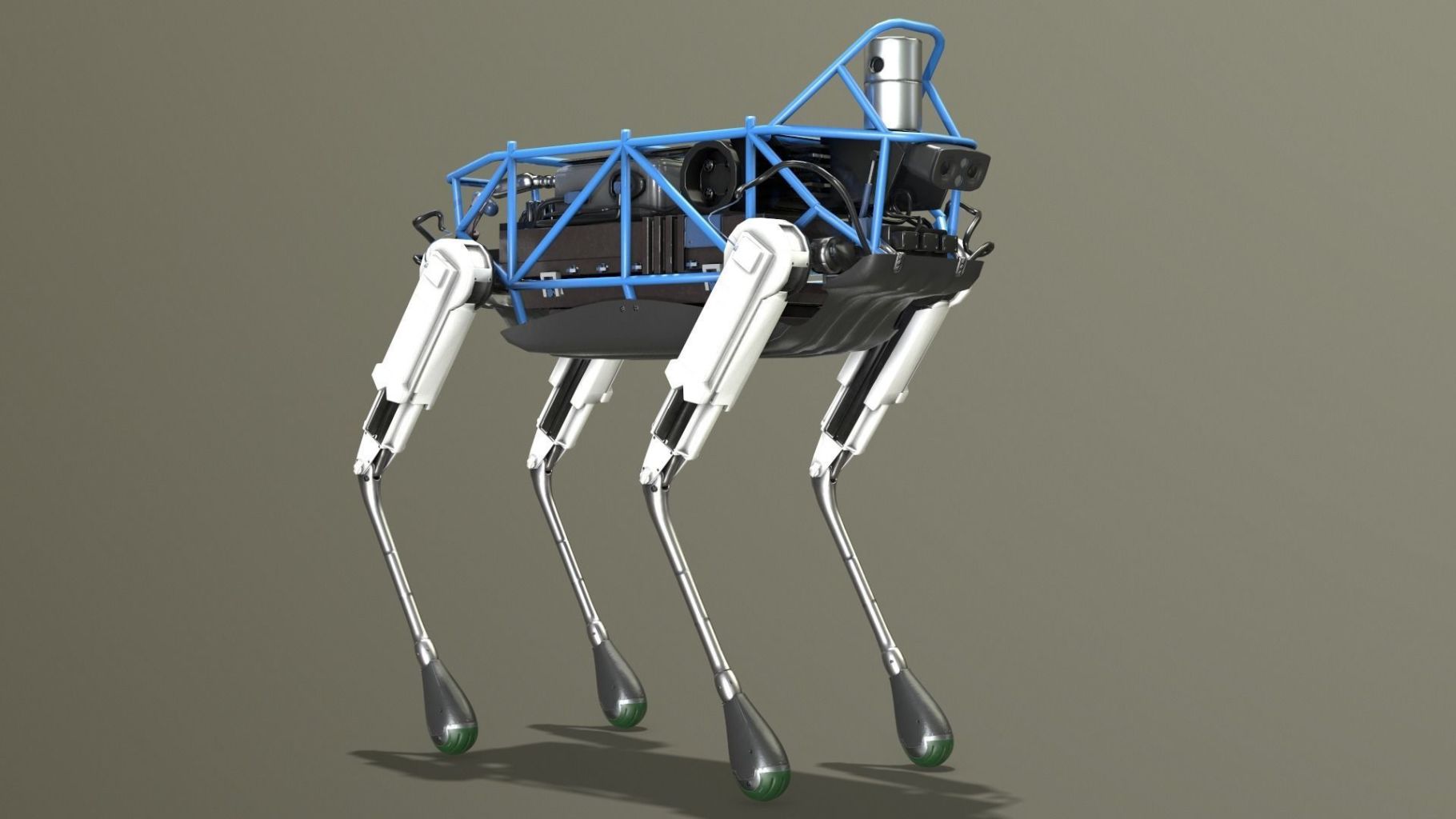
Spot Mini
机构:波士顿动力(Boston Dynamics)类型:足式 » 四足应用:科研实验作品, 仿人机器人, 军事辅助机器人
四足机器人Spot 利用激光雷达和立体视觉技术,搭载一套车载传感器,能够识别崎岖地形,在行进中保持平衡和协调,灵活性更高。
在2017至2020期间,波士顿动力还推出了Spot Mini,会开门、爬楼梯、跳舞、拉卡车等一系列技能,并与美国警方合作,扮演“警犬”的角色协助警察完成导航、解救人质等工作。
随着Spot机器人技能的不断更新和丰富,2019年Spot终于开始商业化落地,售价53万人民币。
后续有新版Spot Mini(+ARM)版本














人形机器人 Handle
机构:波士顿动力(Boston Dynamics)类型:足式 » 双足人形应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人
Handle 机器人外观酷似 Atlas bot 和 Segway 平衡车的下一代产品。
它拥有控制平衡能力,在运动时能避免摔倒。Handle 十分灵活,它能载重、下蹲,甚至还能跨越障碍物。这个机器人行进速度更快。同时,其还具备跳跃功能,最高可以跳跃 4 英尺的高度。




Handle Version
机构:波士顿动力(Boston Dynamics)类型:轮式 » 双轮应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人
北京时间2017年2月4日,谷歌母公司 Alphabet 旗下机器人公司波士顿动力(Boston Dynamics)曝光了最新一款两轮人形机器人“Handle”,它能载重、下蹲,甚至还能跳跃以跨过障碍物。
Handle Logistic机器人全身共具有11个自由度,其中下半身7个自由度,上身机械臂4个自由度。
下半身的自由度分别是每条单腿3个自由度,均分布在Pitch方向,再加上“大尾巴”的一个额外Pitch方向的自由度,从作者视频中的观察,腿部应该不具备Roll与Yaw方向的自由度(trunk joint处),机器人通过内外轮的转速差进行转向。
上身的机械臂应该为4轴,为Pitch-Pitch-Yaw-Pitch+末端执行器(气动吸盘)的分布。




波士顿动力全新轮式机器人 Mobed
机构:波士顿动力(Boston Dynamics)类型:轮式 » 四轮应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人
它的主体是一个扁平的矩形平台,可在其上放置各种工具,另有四个 12 英寸的充气轮胎。每个轮胎都配备了三个电机,可以独立控制。
借助这些电机和复杂的悬挂系统,MobED 能够以非凡的精度和稳定性调整平台的角度和行进路线,即使在不平坦的表面或坡道上行驶时,也能保持极度的平衡。
目前,该设备可以自主或远程操作,设计用于搬运物体,但最终它可以用于‘搬运’人。

LS3
机构:波士顿动力(Boston Dynamics)类型:足式 » 四足应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人
LS3由美国国防高级研究计划局和美国海军陆战队资助,用于任何地形的海军陆战队和士兵步行伴侣,帮助承担他们的负重。
它高1.7米,重达590千克波士顿动力的设计初衷是让它追随海军陆战队,当名搬运军资的后勤兵。不枉它长着这一副好身板,在一次平坦地形测试中,LS3扛起了超过500千克的负载。
某次实地拉练中,它灌足了燃料,携带182千克的设备,在24小时内走了32公里。研发团队为它装备的技能有计算机视觉、地形传感、避障和GPS导航。
不过美国海军陆战队最终放弃了它,主要是因为噪声太大,容易在战场暴露目标。




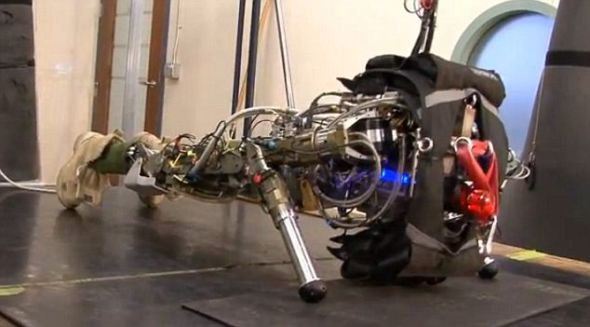
大福 AlphaDog Proto
机构:波士顿动力(Boston Dynamics)类型:足式 » 四足应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人
AlphaDog Proto 于 2011 年问世,由 DARPA 和美国海军陆战队资助,AlphaDog Proto能够在32公里内执行任务,在不同的山地中执行任务,负重200公斤执行任务,适合在短距离的野外执行任务。
其动力系统采用内燃机为支持,体型比其BigDog小,更加适合在开放空间执行任务。

大狗 BigDog
机构:波士顿动力(Boston Dynamics)类型:足式 » 四足应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人
因形似机械狗被命名为“大狗”,专门为美国军队研究设计,并不依靠轮子行进,而是通过其身下的四条“铁腿”。
美军将阿富汗作为测试这种具有高机动能力的四足仿生机器人的试验场,开始试验这款机器人与士兵协同作战的性能。






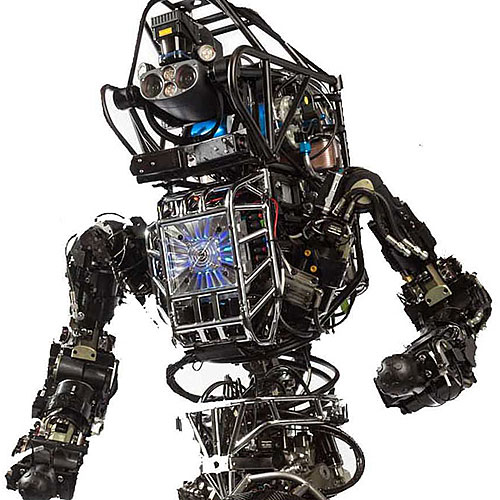
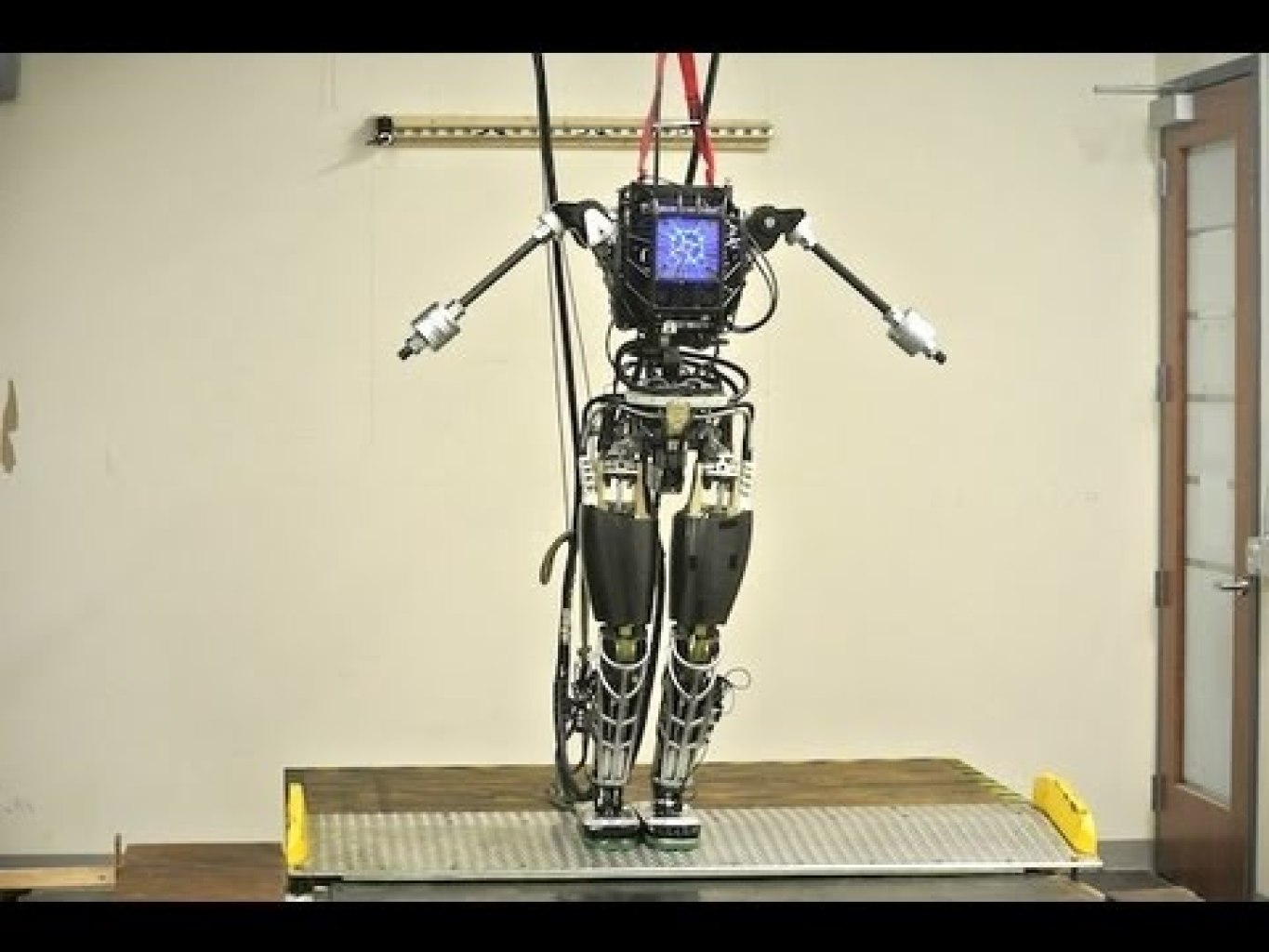
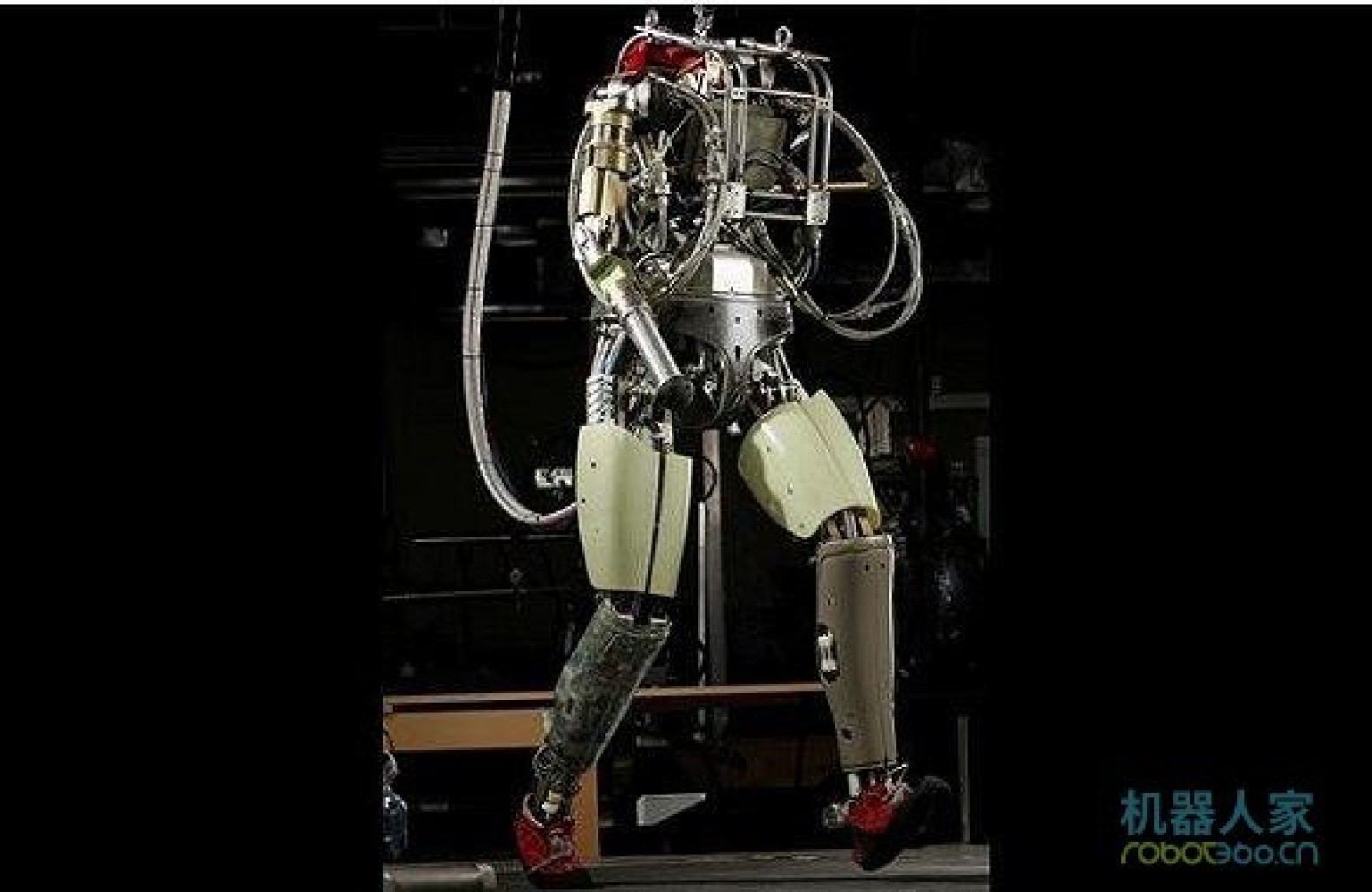
早期 Atlas
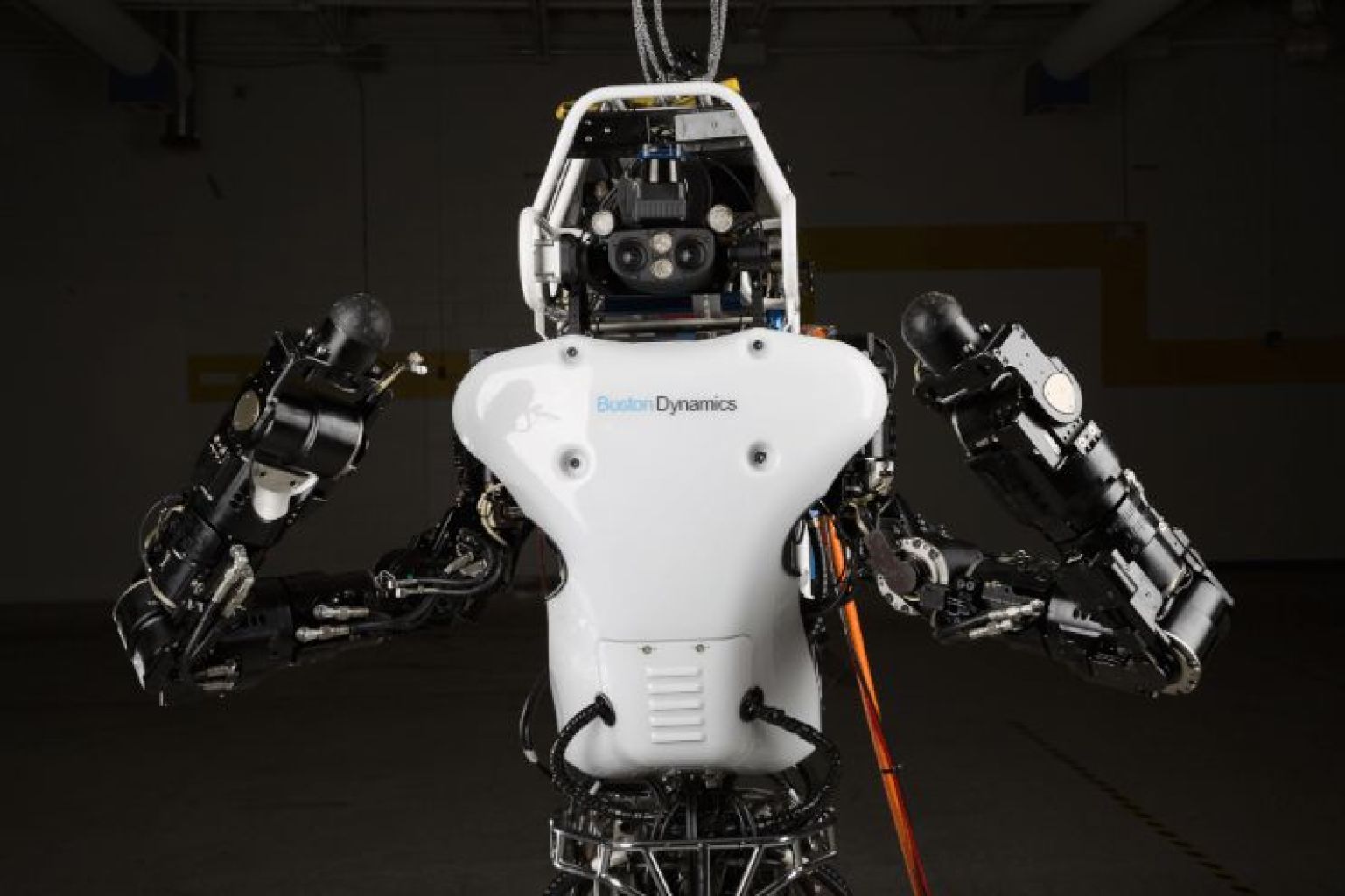
机构:波士顿动力(Boston Dynamics)类型:足式 » 双足人形应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人
早期的 Atlas (阿特拉斯)是一个笨重的人形机器人,可以在崎岖的地形上行走并操纵物体。
它看起来像终结者,但它被设计为作为 DARPA 机器人挑战赛的一部分的救援机器人。




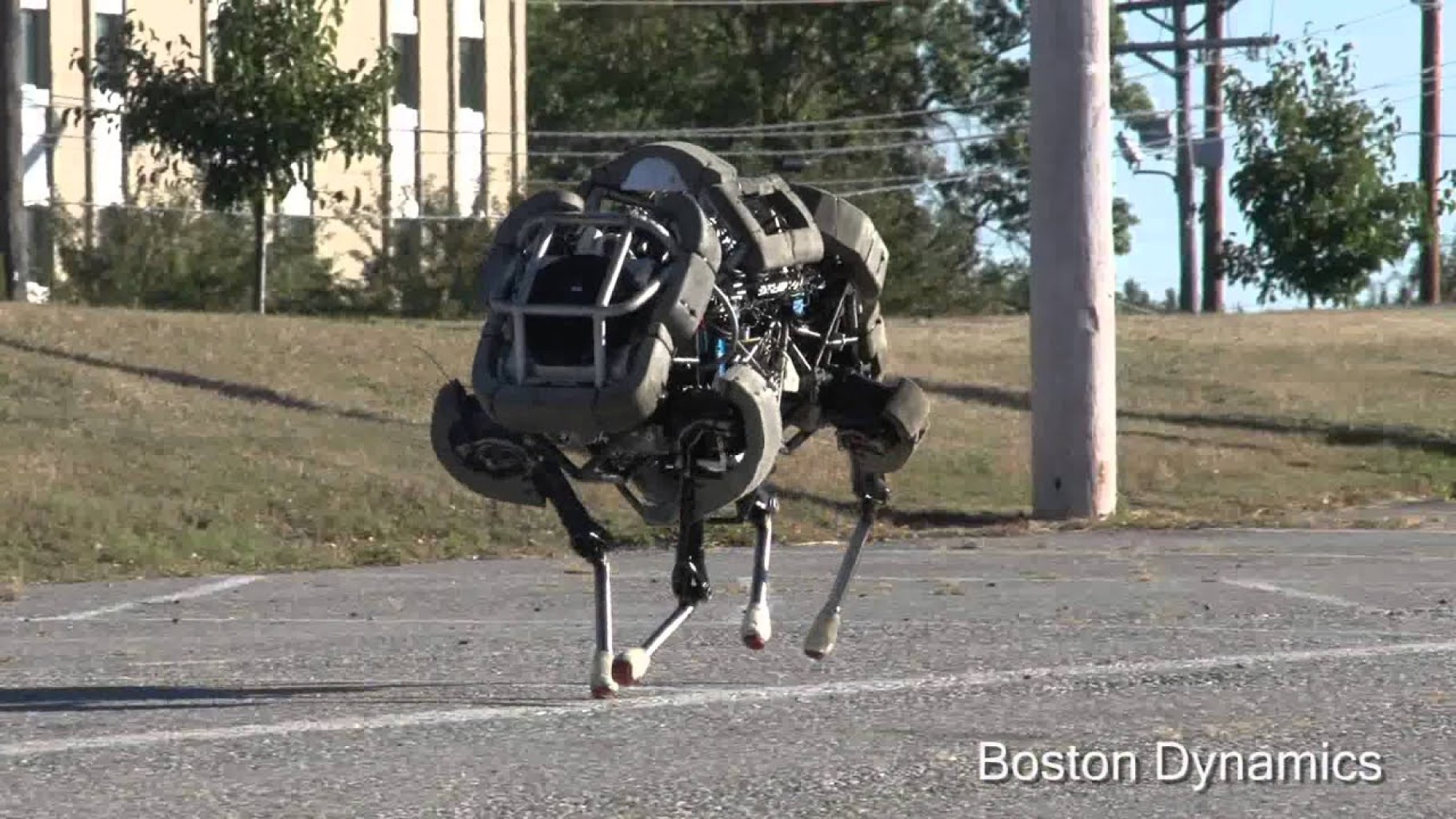
Wild Cat
机构:波士顿动力(Boston Dynamics)类型:足式 » 四足应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人
Wild Cat是波士顿动力公司开发的四足机器人。
它可以以高达每小时 19 英里的速度运行。
它在与液压泵相连的二冲程推车发动机上运行。
目前它只配备了一个小油箱,只能运行大约五分钟。





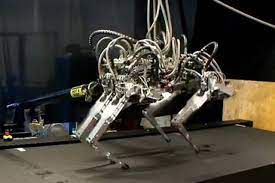
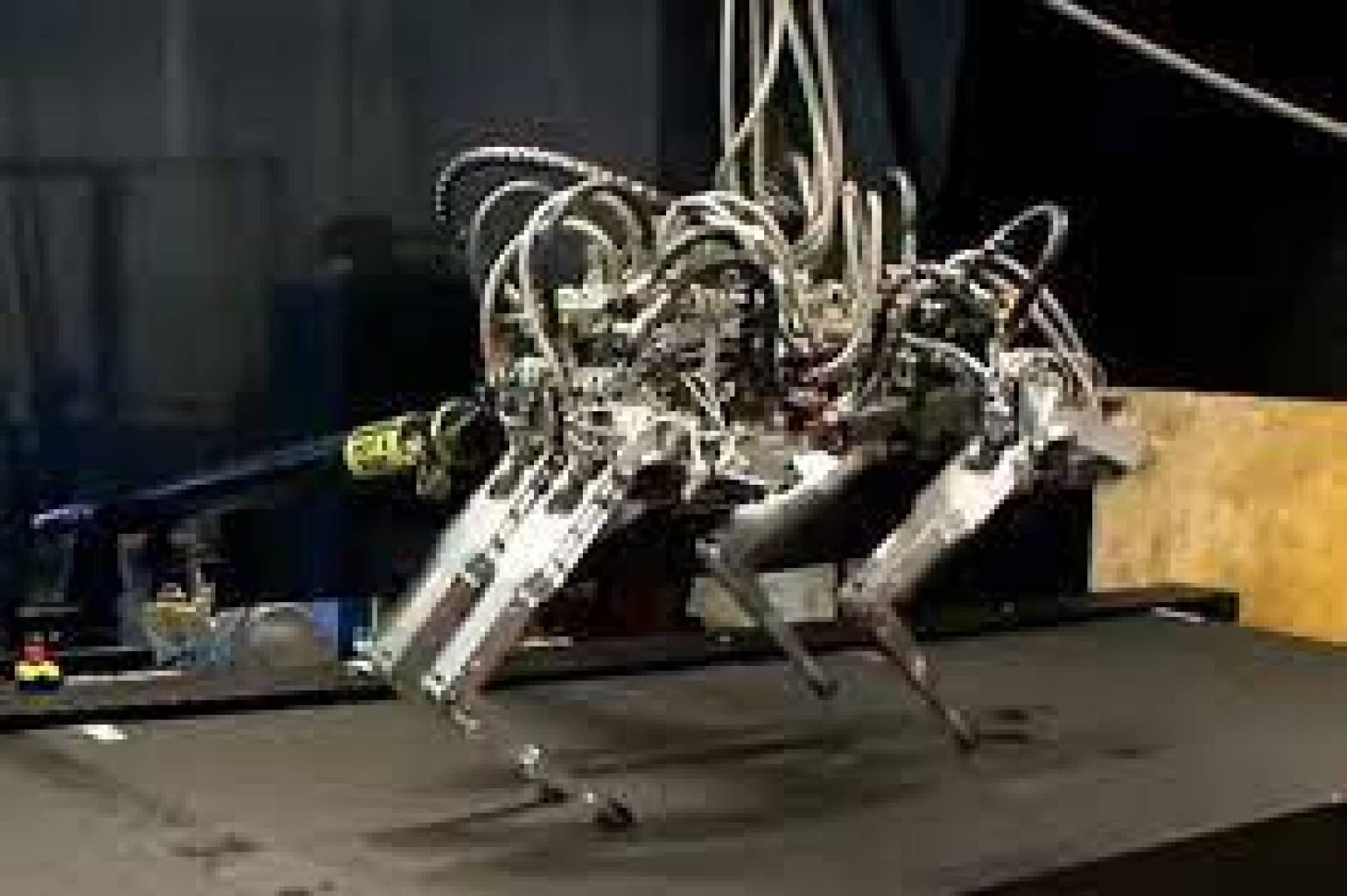
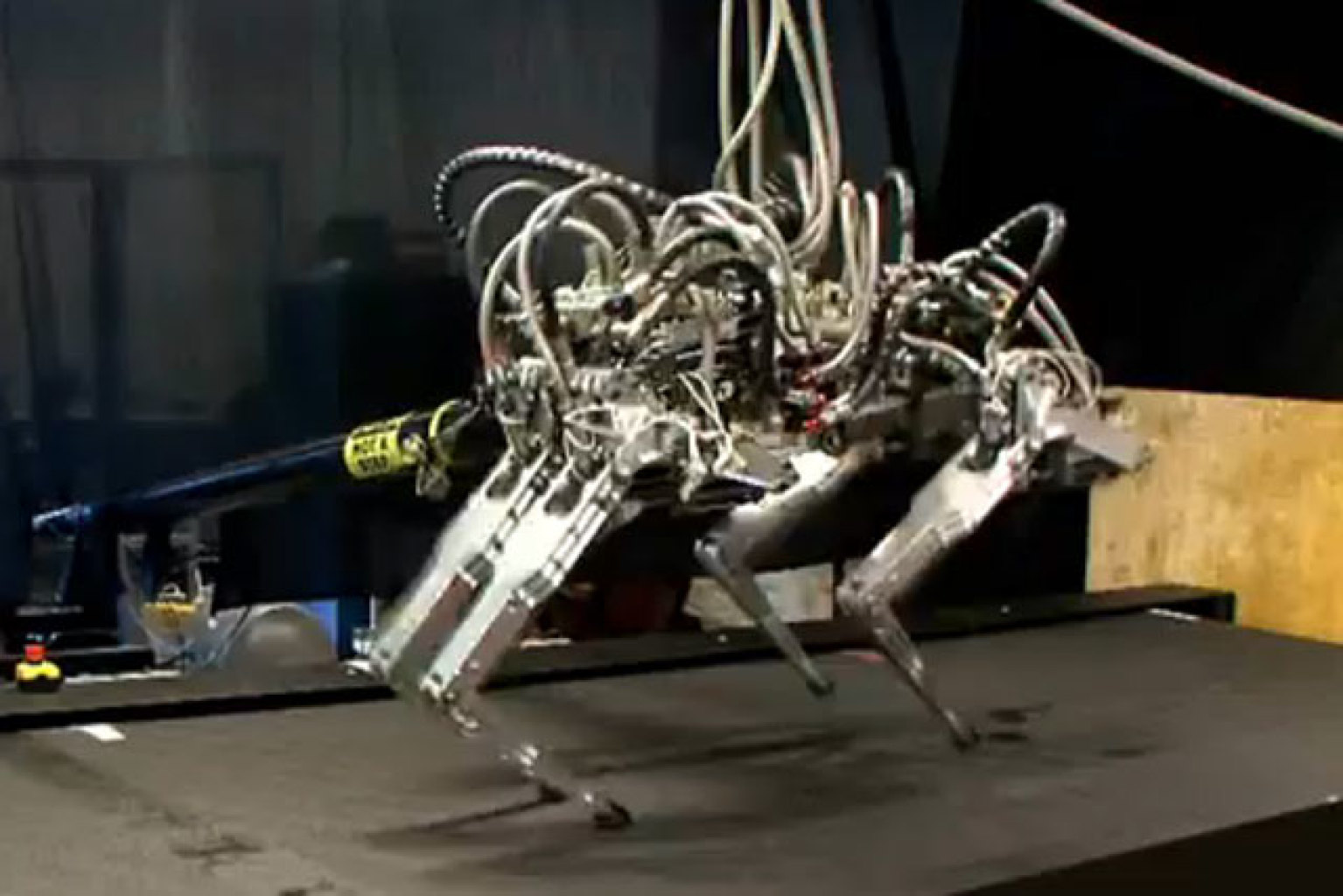
Cheetah
机构:波士顿动力(Boston Dynamics)类型:足式 » 四足应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人, 工业机器人
Cheetah是波士顿动力研发的一款四足机器人。
以 28.3 英里/小时的新最高速度超越了尤塞恩·博尔特,后者在 2009 年以 27.8 英里/小时的速度创造了 100 米短跑的世界纪录。

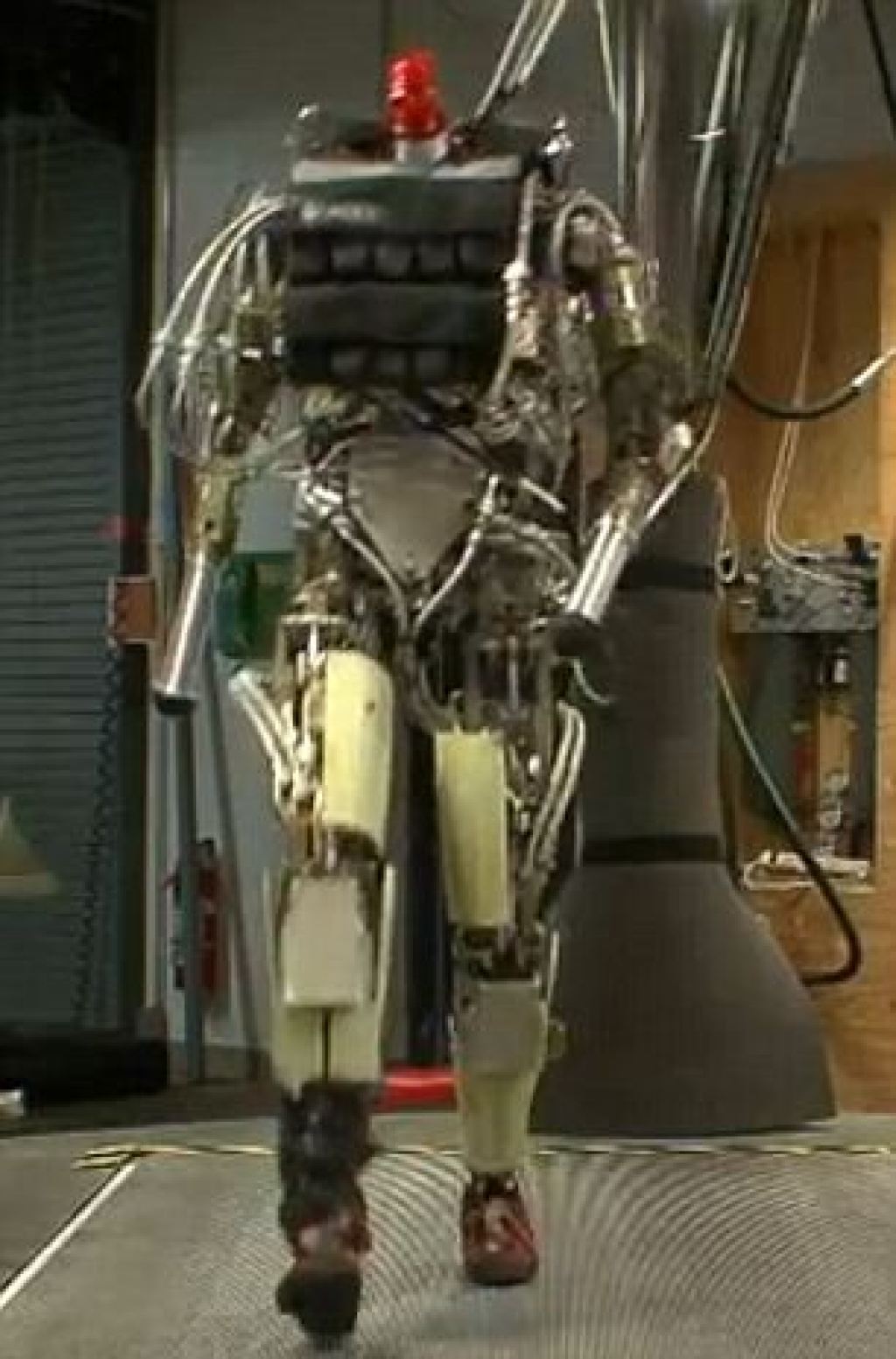
Pet Man
机构:波士顿动力(Boston Dynamics)类型:足式 » 双足人形应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人, 工业机器人, 科研实验作品
Petman是美国波士顿动力公司研制出的一种像真人一样四处活动的机器人,它的职能是为美军实验防护服装。
Petman能自我保持平衡 。




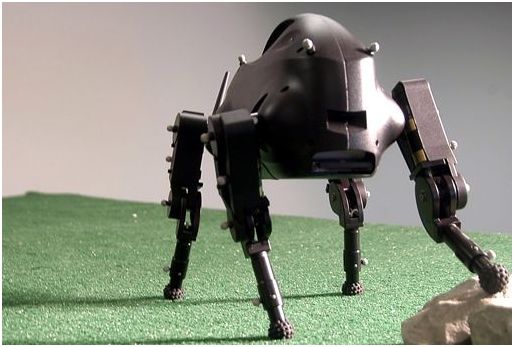
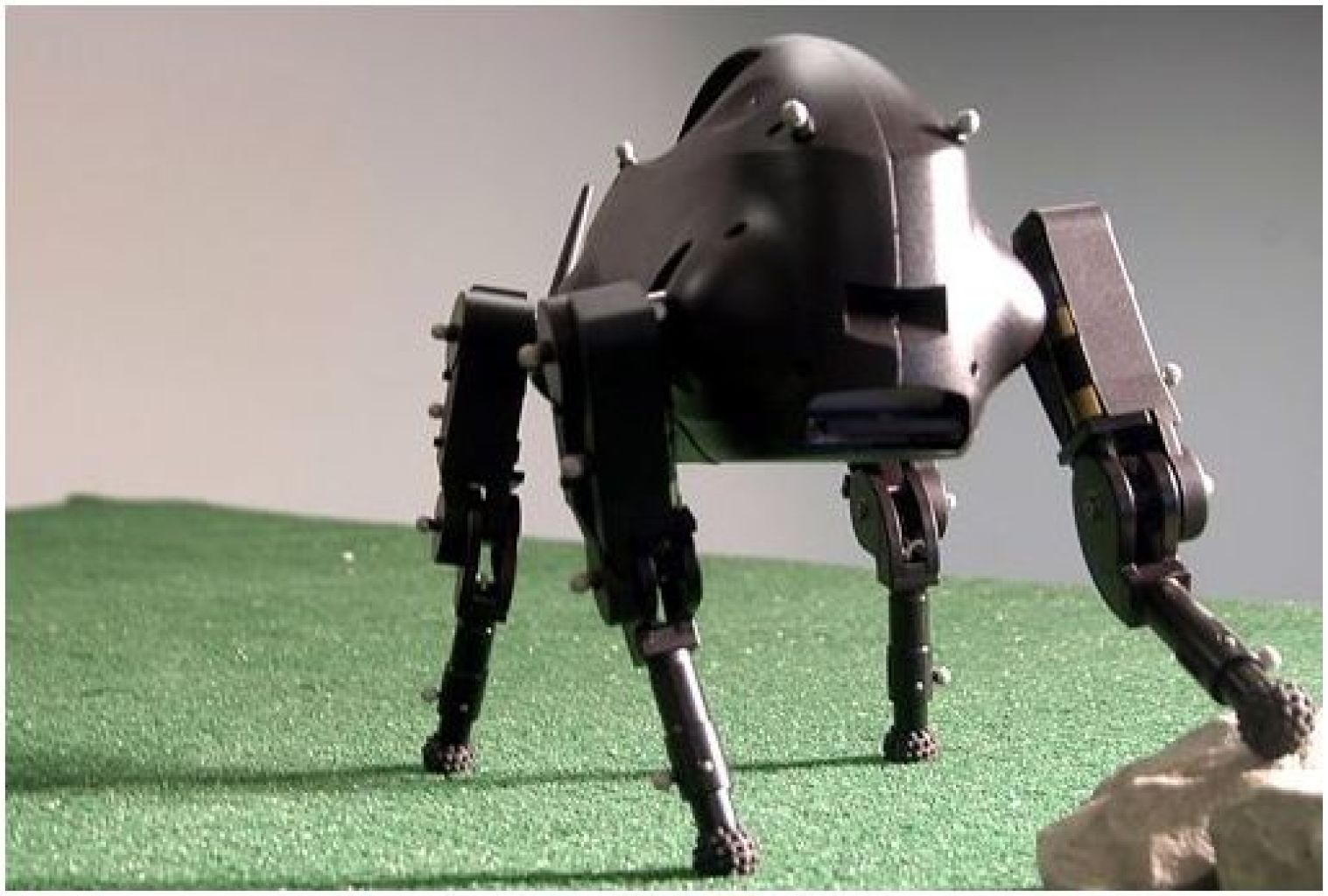
Little Dog
机构:波士顿动力(Boston Dynamics)类型:足式 » 四足应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人, 工业机器人, 科研实验作品, 勘探巡逻机器人
Little Dog是由Boston Dynamics Inc.(BDI)开发的四足机器人。
整体结构重约3千克,高约30厘米,采用高增益伺服电机为每个关节提供动力,集成了Vicon运动捕捉系统,该系统由固定在实验区域周围的六个摄像头和一台用于处理图像的计算机组成。
Little Dog的身体和腿部有22个反光球。



Stretch 量产版
机构:波士顿动力(Boston Dynamics)类型:机械臂应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人, 工业机器人, 科研实验作品, 勘探巡逻机器人, 工业机器人
波士顿动力公司推出了第二款商用机器人Stretch 的商业版本,这是一款可供购买的仓库搬运机器人。
Stretch 于 2021 年 3 月以原型形式出现,经过一年的在职试验和更多开发,它被提炼成商业产品。
机器人的目的仍然是一样的:它是一个盒子搬运工。
与原型相比,Stretch 的商业版本发生了很大变化。一项新功能是,如果一堆箱子倒下,Stretch 可以自动恢复倒下的箱子。
商业版的 Stretch 可以举起 50 磅,并使用大容量电池选项运行 16 小时。
Stretch 安装在一个大的轮式底座上,因此它在全天可以做的事情上具有更像人类的灵活性。






Prototype Stretch
机构:波士顿动力(Boston Dynamics)类型:机械臂应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人, 工业机器人, 科研实验作品, 勘探巡逻机器人, 工业机器人, 工业机器人
Stretch 类似于我们在工厂中经常看到的关节式机械臂。另一方面,波士顿动力机器人有一个轮式底座,可以让它在周围环境中自由移动。当需要卸载装满箱子的卡车时,Stretch 可以自行将滚轮带移动到位,然后开始卸载并将箱子送到生产线上,无需人工干预。
Prototype Stretch 关节臂具有七个自由度 (DoF),这意味着它可以在所有方向上移动,包括俯仰、偏航和滚动。
波士顿动力公司在手臂末端使用了一个吸力驱动的“智能抓手”,以拾取重达 50 磅的箱子和其他物体。夹持器的压力和光学传感器使其能够评估它所持有的任何物体以获得最佳抓地力。
Stretch 通过计算机视觉系统感知世界,这使其能够识别盒子,而无需客户训练机器人来识别将要移动的特定盒子。
它可以完全原地转动,而无需左右摆动、倒退或执行复杂的操作来改变方向。










Pick
机构:波士顿动力(Boston Dynamics)类型:机械臂应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人, 工业机器人, 科研实验作品, 勘探巡逻机器人, 工业机器人, 工业机器人, 工业机器人, 运输配送机器人
Pick 是波士顿动力公司创建的世界上第一个基于深度学习的解决方案机器人。
Pick 技术结合使用视觉传感器和深度学习软件,可以和商用机械臂一起将箱子从托盘移动到传送带,或在托盘上堆放箱子。









RHex
机构:波士顿动力(Boston Dynamics)类型:足式 » 六足应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人, 工业机器人, 科研实验作品, 勘探巡逻机器人, 工业机器人, 工业机器人, 工业机器人, 运输配送机器人, 勘探巡逻机器人
RHex 是一种动力自主、不受束缚、柔顺腿结构的六足机器人。
最终迭代的RHex机器人达到的能力包括:
- 在相当平坦的自然地形上以高达每秒 5 个身体长度的速度运行(刚好超过 2.25m/s)
- 爬上各种各样的楼梯
- 爬坡高达 45 度
- 穿越高达20cm的障碍物(大约是RHex腿部间隙的两倍)
- 连续跑步 45 分钟,以高效步态覆盖长达 3 英里
- 成功穿越带有大块岩石和障碍物的严重破碎地形
- 倒立行走和奔跑
- 翻转后仍可以行走
- 跨越30厘米宽的沟渠
- 支持最远150m距离遥控
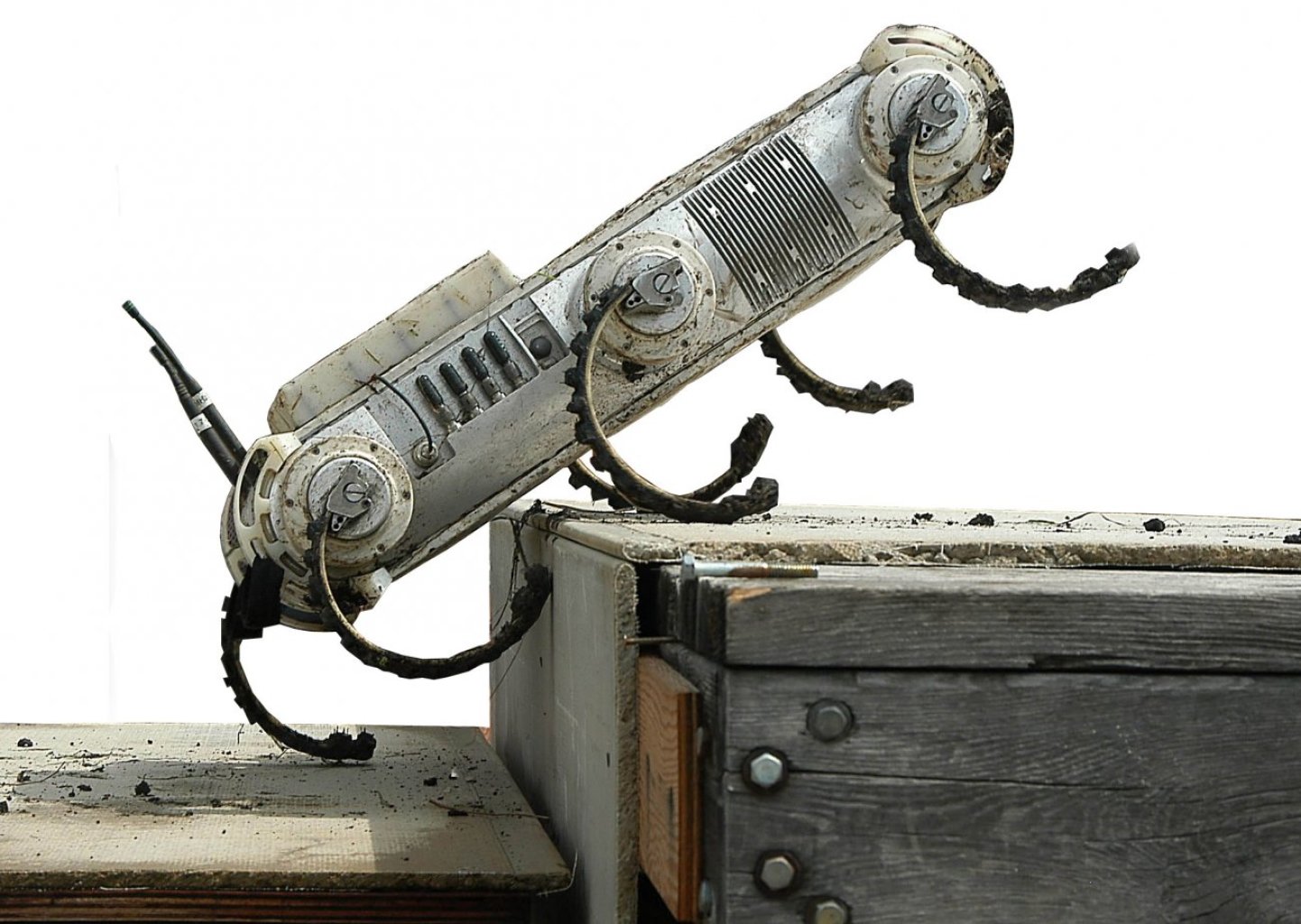



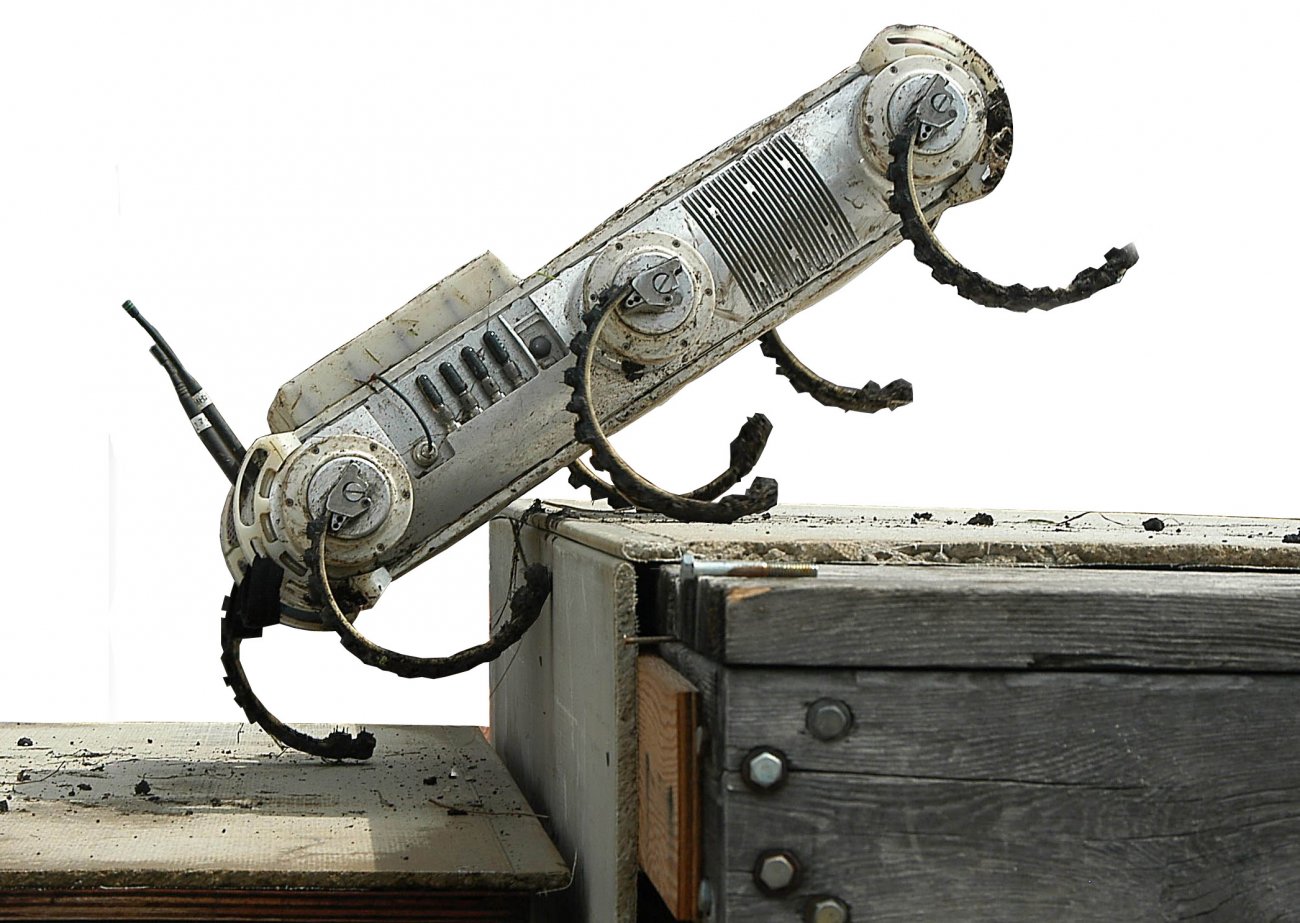
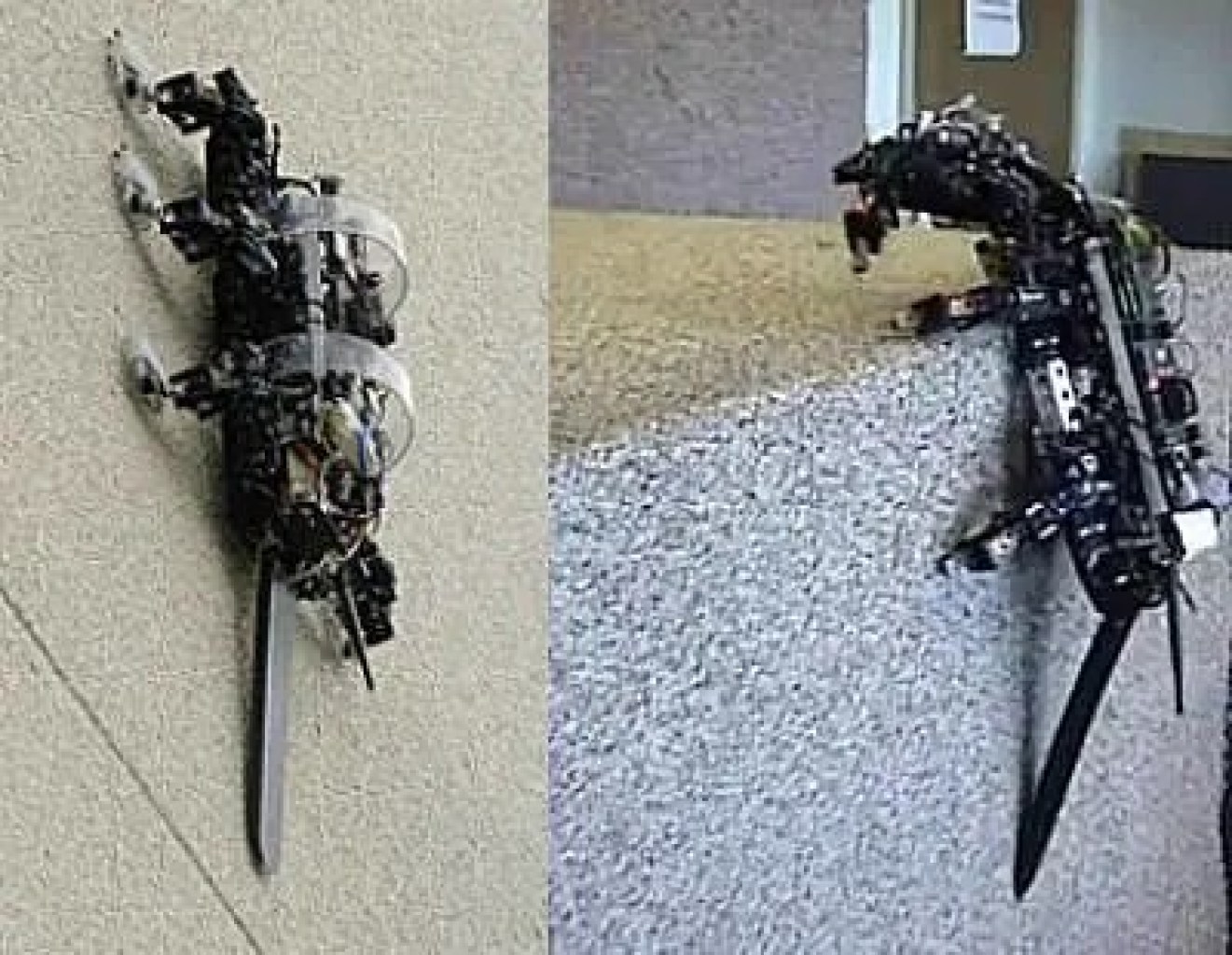
RiSE
机构:波士顿动力(Boston Dynamics)类型:足式 » 六足应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人, 工业机器人, 科研实验作品, 勘探巡逻机器人, 工业机器人, 工业机器人, 工业机器人, 运输配送机器人, 勘探巡逻机器人, 勘探巡逻机器人
RiSE攀爬机器人由波士顿大学、宾夕法尼亚大学、卡内基梅隆大学、加州大学伯克利分校、斯坦福大学、刘易斯和克拉克基金会等机构联合研发,是一种使用接触感测器带动伸缩腿的机器人。
RiSE长0.25米、重2公斤,6条腿通过2台电动机获得动力,机身携带的计算机控制腿部动作,运动速度每秒0.3米,能够在墙壁、树木和栅栏等垂直物体上爬行,利用脚上的「微瓜」吸附物体的变形表面,可以根据物体表面曲度改变姿态,尾巴帮助机器人在快速爬升过程中保持平衡。
RiSE攀爬机器人有6条「腿」,一对电动马达和一个计算机控制的内部运动的腿关节,携带多部感测器,包括联合方位感测器、腿部应变感测器和足部接触感测器。目前,该机器人可用于多种公用民用任务,比如搜索和救援、侦察和监视等军事任务。美国国防部高级研究计划署(DARPA)曾经对RiSE攀爬机器人进行过测试。






早期 Spot Mini
机构:波士顿动力(Boston Dynamics)类型:足式 » 四足应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人, 工业机器人, 科研实验作品, 勘探巡逻机器人, 工业机器人, 工业机器人, 工业机器人, 运输配送机器人, 勘探巡逻机器人, 勘探巡逻机器人, 个人服务机器人
早期 Spot Mini是波士顿动力公司的一款四足机器人产品。
最初的 Spot 大约有一只大型獒犬那么大,但这款小型犬类机器人仅重 65 磅,相当于一只金毛猎犬。
SpotMini 不仅比以前的型号更轻便,而且波士顿动力公司将其吹捧为“我们制造过的最安静的机器人”。
SpotMini 是全电动的,没有液压装置,充电后可以连续运行大约 90 分钟,具体取决于它执行的任务。
其他功能包括传感器、深度相机、固态陀螺仪和每个肢体中的本体感觉传感器的集合,这些传感器有助于导航和移动操作。SpotMini 能够自行执行一些任务,但是,大多数高级指导都需要使用人。
该机器人可以装载洗碗机,甚至可以给你带来啤酒。






Spot Classic
机构:波士顿动力(Boston Dynamics)类型:足式 » 四足应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人, 工业机器人, 科研实验作品, 勘探巡逻机器人, 工业机器人, 工业机器人, 工业机器人, 运输配送机器人, 勘探巡逻机器人, 勘探巡逻机器人, 个人服务机器人, 勘探巡逻机器人
Spot Classic 于 2015 年问世,是波士顿动力公司专为室内和室外活动而设计的四足机器人。它是一款电动、液压驱动的机器人,可以熟练地爬楼梯和爬山。
Spot Classic 是一款专为室内外环境设计的四足机器人,基于早先版本的机器人开发而得来,具备狗的外形和很强的机动性能和稳定性。
Spot Classic 身高0.94米,自重75公斤,最大负载45公斤,电池供电,液压驱动,360°全景雷达,12个关节点。
采用雷达和立体视觉用于感知环境,可以保持自身平衡并在复杂里面实现全自主导航。




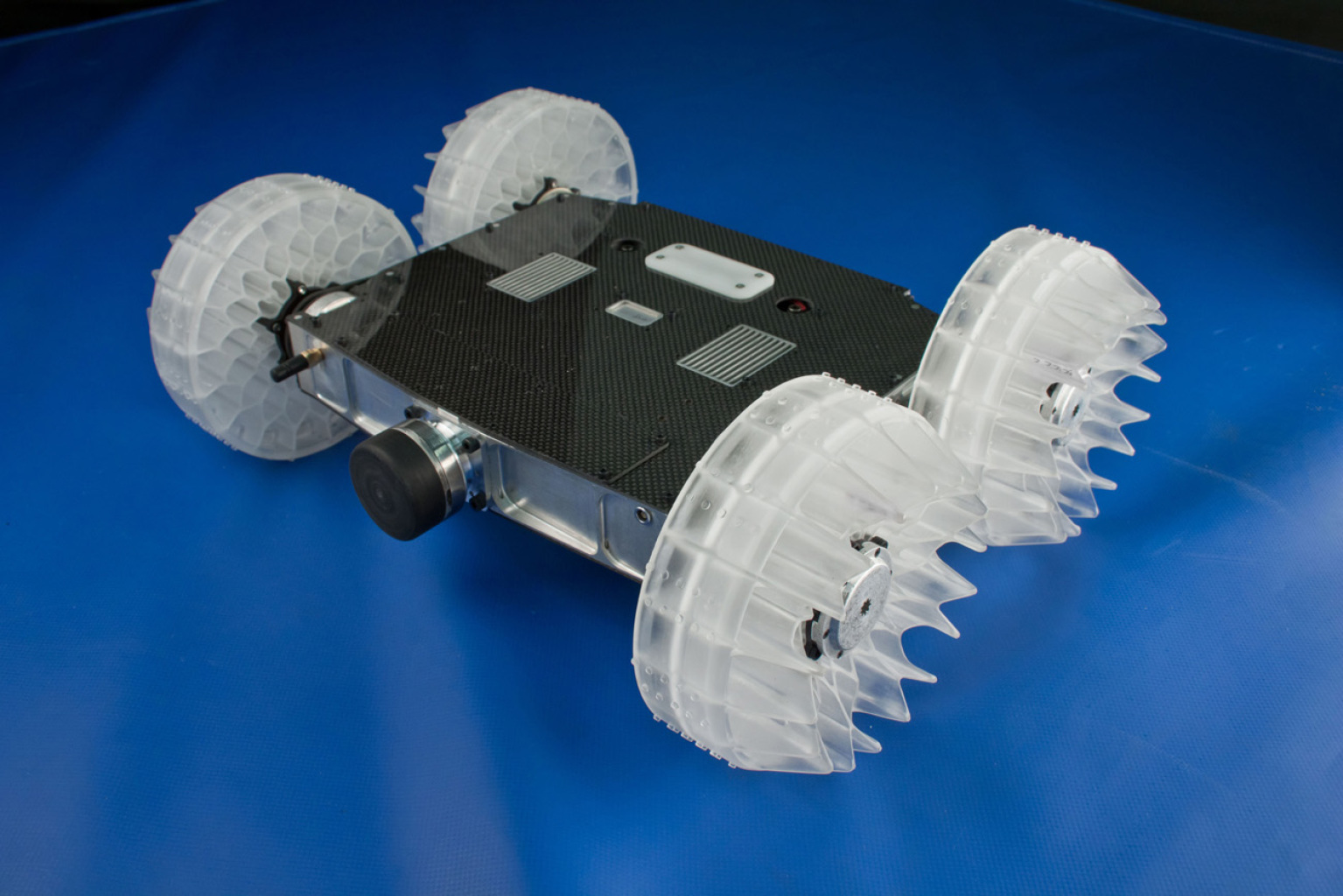
Sand Flea
机构:波士顿动力(Boston Dynamics)类型:轮式 » 四轮应用:科研实验作品, 仿人机器人, 军事辅助机器人, 运输配送机器人, 工业机器人, 运输配送机器人, 运输配送机器人, 军事辅助机器人, 军事辅助机器人, 军事辅助机器人, 仿人机器人, 工业机器人, 科研实验作品, 勘探巡逻机器人, 工业机器人, 工业机器人, 工业机器人, 运输配送机器人, 勘探巡逻机器人, 勘探巡逻机器人, 个人服务机器人, 勘探巡逻机器人, 勘探巡逻机器人
Sand Flea 是一个 11 磅重的机器人,在平坦的地形上像遥控车一样行驶,但可以跳到 30 英尺高的空中克服障碍。它的高度足以跳过复合墙、屋顶、楼梯或二楼窗户。
尺寸:
重量:11 磅
尺寸:13″L x 18″W x 6″H
电源:
电池:可充电锂聚合物
跳跃执行器:一次性燃料盒
续航时间:2 小时,25 次跳跃
机动性:
速度:3.4 mph
跳跃高度:1-8 m
可翻转
环境:
温度:-15C 至 45C 环境连续运行
防水
暴露:耐受湿度、盐、油、沙子极端条件
摄像头:
驱动分辨率:320×240 像素
静止图像分辨率:1280×960 像素
照明器:可调节 6W 可见光、6W 红外



相关文章
2024-01-02
Scott Kirsner
2023-12-30
维基百科
2023-11-10
雅虎财经
2023-10-30
The Robotrerort | Brianna Wessling
2023-10-30
Iot world today | Scarlett Evans
2023-10-30
The Robotrerort | Brianna Wessling
2023-08-15
strategy+business
2023-08-07
Techwire | Muhammad Zulhusni
2023-08-07
Techwire | Muhammad Zulhusni
2023-05-15
知乎 | sunny
2023-05-15
知乎 | sunny
2022-07-18
腾讯网
2022-07-18
虎嗅
2022-04-20
知乎
2022-04-20
知乎 | strongerHuang
2022-04-20
知乎 | strongerHuang
2021-08-28
知乎 | 仙魁XAN
2021-08-28
知乎 | 仙魁XAN
2021-06-25
古月居
2021-04-08
知乎 | 古月
2021-03-29
The Verge
2021-03-08
古月居
2020-12-11
PR Newswire | Hyundai Motor Group
2019-05-19
知乎
2017-06-09
TechCrunch+
2016-02-24
美股之家
2013-12-14
纽约时报
2012-10-02
The Conversation
相关视频
2024-01-02
Scott Kirsner
2023-12-30
维基百科
2023-11-10
雅虎财经
2023-10-30
The Robotrerort | Brianna Wessling
2023-10-30
Iot world today | Scarlett Evans
2023-10-30
The Robotrerort | Brianna Wessling
2023-08-15
strategy+business
2023-08-07
Techwire | Muhammad Zulhusni
2023-08-07
Techwire | Muhammad Zulhusni
2023-05-15
知乎 | sunny
2023-05-15
知乎 | sunny
2022-07-18
腾讯网
2022-07-18
虎嗅
2022-04-20
知乎
2022-04-20
知乎 | strongerHuang
2022-04-20
知乎 | strongerHuang
2021-08-28
知乎 | 仙魁XAN
2021-08-28
知乎 | 仙魁XAN
2021-06-25
古月居
2021-04-08
知乎 | 古月
2021-03-29
The Verge
2021-03-08
古月居
2020-12-11
PR Newswire | Hyundai Motor Group
2019-05-19
知乎
2017-06-09
TechCrunch+
2016-02-24
美股之家
2013-12-14
纽约时报
2012-10-02
The Conversation